



ジャガー『I-PACE』を改造したEVで、アメリカのロサンゼルス、サンフランシスコなどでサービスが始まっている自動運転タクシーの「Waymo」に初めて乗車。自動運転の可能性についてチューリング社にも取材した、自動車生活ジャーナリスト・加藤久美子氏のレポートです。
11月からロサンゼルスでついに一般サービス開始!
昨年サンフランシスコを訪れたとき、街中を無人で走っているタクシーがいてびっくりしました。その時筆者はウーバー(ライドシェアタクシー)に乗っていて、ドライバーから「あれが無人タクシーだよ。運転手がいないんだ。怖いよね? 今、このあたりでテストしているんだ」と教えられて気づきました。
筆者が現在は「Waymo」として運営されている無人タクシーの実験シーンに初めて出会ったのは2015年3月のこと。シリコンバレーにあるコンピュータ歴史博物館(Google本社至近)の中に当時の実験車両(レクサスRX)が展示されており、周辺の道路で実験している様子も目にしました。

なお、Waymoはこの2015年には世界初となる公道での完全自動運転をテキサス州オースチンの一部エリア限定ではありますが、達成しています。初めて乗客となったのは開発者の全盲の友人でした。当時使用されていた自動運転車両は「ファイアフライ」というGoogleが自社で開発した小型のBEVでハンドルやペダル類など人の運転に必要なものは一切装備されていなかったとのこと。
その翌年にWaymoはGoogleから独立し、Googleの親会社であるアルファベット社の傘下となりました。このタイミングで現在の「Waymo」という名前が登場したのです。
Waymoは独自開発のファイアフライに加えて、レクサスやクライスラーパシフィカなど市販車種で公道での実証実験を重ねてきました。現在の主力は英国ジャガー社から供給される純電気自動車の高級SUV『I-PACE』です。標準のI-PACEをベースにオーストリアの自動車製造大手「マグナ」社が自動運転に必要なハードウェアパーツを架装し、専用の「I-PACE Waymo」として運用しています。
フロントに1基、サイドに2基、そしてリアに1基の合計4基のLiDARユニット(レーザーを照射して周辺の障害物を検知する)を軸に、6個のレーダー、29個のカメラ、そして8個の超音波センサーを搭載しています。超音波センサー以外はWaymo仕様として独自のハードウェアですが、自社開発のユニットを採用しているため、外装デザインとなじむ一体感のある仕様となっています。

乗ってみました! タクシーアプリとほぼ同じ操作でOK
Waymoはこれまでの数年間で年間数億kmレベルでの実証実験が行われ、今年11月12日からついにロサンゼルスの市街地(約80万平方マイルの地域)で無人タクシーとしての一般向けサービスが開始されました。筆者が滞在していたガーデナ地区はサービス地域外でしたので、サービス地域にある商業施設の駐車場に車を停めてWaymo を使ってみることに。
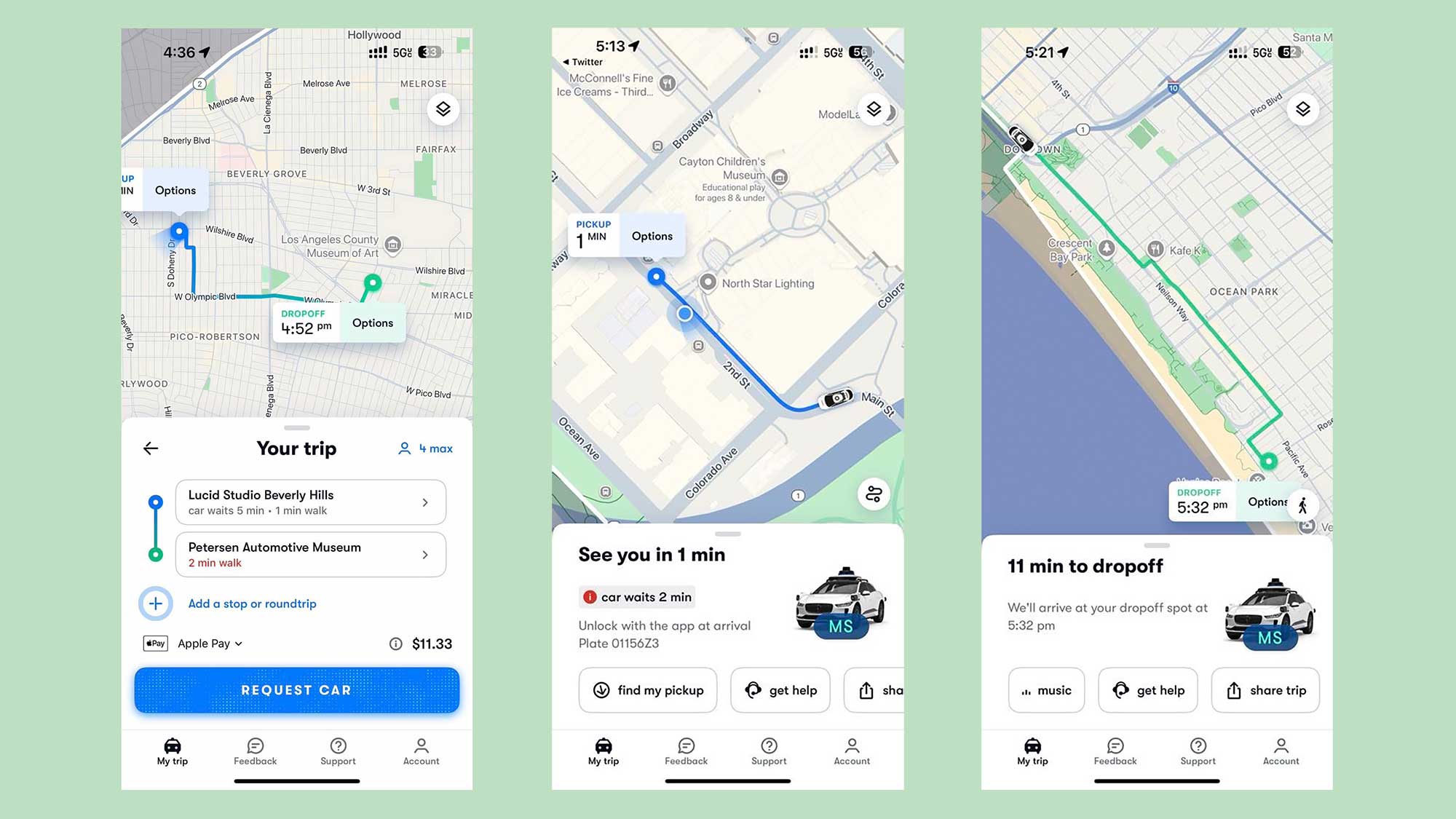
Waymoの利用はまずは「Waymo One」というアプリをスマホにインストールすることから始まります。とても使いやすいアプリで、日本のタクシーアプリを使ったことがある人ならすんなり使えるでしょう。言語表示に日本語はありませんが、それほど難しい単語は出てこないので中学英語で何とかなります。
アプリで迎車場所と目的地を設定すれば料金と迎車時刻などが表示されます。LAでは数年前からWaymoに限らず公道での自動運転タクシーが実験を行っているため、迎車場所や目的地として設定できない場所なども細かく表示されるのでとても安心できました。予約を完了すると乗車定員や荷物スペースの情報。子どもがいるならチャイルドシートを使用することの警告も案内に表示されます。
迎車までの所要時間が確定すると支払い画面となり、Apple PayやGoogle Payといったスマートフォン内蔵の決済方法に加え、各種クレジットカードにも対応していました。複数のWaymoが近い場所に同時に来た際も迷うことがないよう、ディスプレイに表示する自分専用2文字IDもアプリ内で設定が可能でした。
運転席への乗車は厳禁

アプリで表示された迎車時刻は交通状況に応じて2-3回更新されましたが、呼んでから15分程度で迎車地として設定したサンタモニカプレイスという商業施設の前に到着しました。運転席にはもちろん誰も乗っていません。無人タクシーに乗るのは初めてのことなので驚きと感動とホントに大丈夫なのか? という複雑な思いが入り混じります。助手席に座ってセンターディスプレイの「START RIDE」にタッチするとWaymoは周囲を注意深く確認し、自転車や歩行者を先に行かせて静かに動き出しました。なお、運転席に乗ることは当然のことながら禁止です。ハンドルに触ることも厳禁と書かれていました。

ごく普通のタクシーのように走り出したWaymoは当然ですが赤信号では停車し、信号のない横断歩道では歩行者や自転車がいないかしっかりと確認してゆっくりと進んでいきます。前後左右、そして屋根にもカメラや各種センサーがセットされていて、360度常に監視しています。人間では完全に死角となる場所もしっかり認知しているので、有人タクシーより事故率は圧倒的に低いのも当然でしょう。
運転席にドライバーがいない状態でハンドルだけが動いている状態は何とも不思議な光景でしたが、信号での停車や発進、右左折、そして横断歩道での歩行者検知や電動キックボードや自転車などの小さな移動体も完全に検知するため走行はとてもスムーズで違和感を覚えることはありませんでした。

後席ディスプレイ。
前席にも後席にもディスプレイが設置されており、周囲の交通状況が表示されるので安心度も高いと感じました。このディスプレイでは目的地までの所要時間やマップ、天気、そして音楽を選ぶことも可能です。再生できる音楽はあらかじめシステム上で複数が用意されていましたが、Google Assistant経由でGoogleアカウントにサインインするとYouTube上の好きな音楽を再生することも可能となります。20分程度の乗車時間でしたが不安を感じることは一度もなく、家族だけの空間ということで遠慮なくおしゃべりしたり写真を撮ったりも楽しめました。

目的地について全員が降りるとWaymoは周辺の交通を確認しながら発進し、どこかへ走り去っていきました。
LA滞在時に2回、Waymoを利用しました。時間帯や混雑状況にもよりますが2マイル(約3.2キロメートル)ほどの距離を10分で移動して運賃は11ドル(約1700円)でした。
自動運転開発最先端の「チューリング」にインタビュー
昨今日本でも自動運転レベル4の無人小型バスが国の認証を得て各地で実証実験や商用運行がスタートしています。「レベル4」の商用第一号は2023年6月に福井県永平寺周辺でスタートしました。こちらは電磁誘導線を敷いたわずか2キロの遊歩道(歩行者と自転車のみ)での運行です。昨今スタートした他の無人バスもほとんどは定められたルートを時速10~30キロのゆっくりした速度で走行するもので、Waymoのように一般タクシーのように使えるものではありません。
はたして、日本の自動運転や無人タクシー開発の現状や可能性はどうなのか。最先端で開発を進める株式会社チューリング株式会社で広報を担当するの阿部拓(ひらく)さんに聞いてみました。また、ちょうどこの原稿を書いているときに、来年、Waymoが日本のタクシー会社と組んで実証実験が開始されることが公表(12月17日に発表)されました。こちらについてもご意見を伺ってみました。
まずは、自動運転についての基礎知識。自動運転には大きく分けて以下2つの流れがあります。チューリングとWaymoはそれぞれ全く別の方針で自動運転を開発しています。
①LiDARセンサーと事前取得したHDマップ情報にルールベースを組み合わせて自動運転を実現する仕組み(代表例:Waymo)
②カメラとAIだけで自動運転を実現する仕組み(代表例:Tesla)
「チューリングは②に該当します。そして同時に、レベル5の完全自動運転を実現できるのは②の流派であると確信しています」(阿部さん)という説明からインタビューが始まりました。
Q. 日本は自動運転の国際基準を主導してきた経緯がありますが、現状はいかがでしょうか?
技術的な観点と法的・国際基準的な観点は必ずしも一致しないと考えています。2024年末時点の自動運転技術という視点で見ると、アメリカや中国が先行している状況です。ただ、私たちチューリングを含む日本の企業が追い越せないかというとそうではなく、先行企業の成功・失敗事例から学ぶことでより効率的な開発や改善が可能になる「後発者利益」も存在します。そうした利点を活かし開発を続けることで再びアメリカや中国を技術的に追い越し、国際基準という観点でもリードすることは可能だと考えています。
Q. 日本の自動運転車の開発が遅れているのはなぜですか?
技術の進展速度の違いには様々な要因が関わっているため一概に○○が原因だと判断することは難しいですが、私たちチューリングとしては、CEO の山本一成が強調する「リーダーシップ」の要素が一つ重要な観点だと考えています。完全自動運転は人々の生活を大きく変えるポテンシャルがある一方、日本ではアメリカや中国ほど「技術的に極めて高い目標を掲げてリスクを取りにいく」企業や組織が多くない印象です。ただし、日本にAIの人材が不足しているかというとそうではなく、Kaggle等の国際的な機械学習コンペや競技プログラミング等で日本人の存在感が際立っていることも一つの事実です。そのため、強力なリーダーシップのもとに才能を結集し正しい技術戦略を持って開発を続ければ世界トップレベルの自動運転システムも十分実現できると考えています。
Q. 来年早々にスタートするWaymo × 日本交通の実証実験についてどう思われますか?
他社様の取り組みについて具体的にコメントする立場にはありませんが、技術的観点から見ると東京のような大都市圏は道路や交通事情が世界でも屈指の複雑さを持つため、難易度は非常に高いと思っています。ただ、このような取り組みによって自動運転技術の安全性や有用性が一般の人々にもっと広く認知され社会受容性が高まることは、同じく自動運転技術を開発する我々私たちチューリングにとってもポジティブな影響があると考えています。
Q. 自動運転の車両としてやはりBEVがベストでしょうか?
人間と同等以上の運転をすることができる自動運転AIにはデータをリアルタイムで高速かつ高度に処理する計算機が必要になります。これは同時にその計算機が車の電力を消費するため、車載バッテリーの容量や効率面は極めて重要です。その点でBEVは走るバッテリーのようなものでもあり、蓄電容量が大きくエネルギーの取り回しが柔軟にできるため、総合的に自動運転車として適していると考えています。
Q. 自動運転に向いているBEVの条件は? 自家用車とタクシー等で違いがありますか?
十分なバッテリー容量と電力供給、優れた冷却システムや放熱設計、OTAによるソフトウェアアップデートの柔軟性やサイバーセキュリティなどに対応したBEVが自動運転に向いていると思います。自家用車とタクシーの違いについては、自家用車がユーザーのライフスタイルやデザイン志向に合わせた車両選択・カスタマイズ性が求められるのに対し、タクシーは 乗客を待たせることなく連続稼働できるよう大容量のバッテリーが搭載されていることや、冗長設計による高い安全性、効率的な配車・運行ソフトウェアなどが求められるのかなと思います。
(インタビューここまで)

人手不足とドライバーの高齢化が深刻な日本のタクシー業界。海外からの観光客も激増する中、無人タクシーの普及は急務だと思われます。
阿部さんのお話から、電気自動車と自動運転の相性の良さや、日本でも実現する可能性を確認することができました。2025年からの実証実験が楽しみですね。
取材・文/加藤 久美子








コメント