



前回の一般道オートパイロットの記事では、実際には自動運転をあまり使わないであろう一般道での動画をご紹介しました。今度は高速道路編。テスラで首都高速都心環状線を全線自動運転で一周する動画をお届けします。
今回のファームウェアは年末にマイナーバージョンアップがあった2018.48.12.1。前回の一般道編は2018.48.1でしたから少しだけ新しいですね。48というのは、2018年の48週目、すなわち11/26-12/2の期間に開発されたバージョンということ。細かいバージョンの違いは、おならモードの追加によるものです。おならモードについては当サイトでは取り扱いませんので(笑)、検索してみてください。
一般の高速道路でオートパイロットを試しても、以前の名古屋行きのときのように何時間も走り続けちゃって面白くないので首都高速で試します。
さて首都高速道路といえば狭くて混んでるイメージ。そしてその中でも都心環状線は最も古く、カーブやトンネルなどの難所が多いイメージだと思います。自動運転のソフトウェアにとっても実はその通り。今までいろんなバージョンで走行してきましたが、通常の速度ではディスエンゲージメント、すなわちソフトウェアが危険と判断して、ドライバーに運転を代わるよう依頼する事象が発生していました。ディスエンゲージメントはビビビビビという大きな警告音と赤の警告画面で表示され、ドライバーはすぐ運転を引き継がなければなりません。しかし2018.48.12.1はなかなか強い。ベータ版ですので完成とは言えないですし、まだ様々な課題は残されるものの、2か所を除いては人間の介入ゼロで自動運転できるレベルまでになっていました。
今回は内回りを走行しています。外回りはまだ難しいんじゃないかなぁ、、その理由は、外回り線は合流の回数が圧倒的に多いからです。
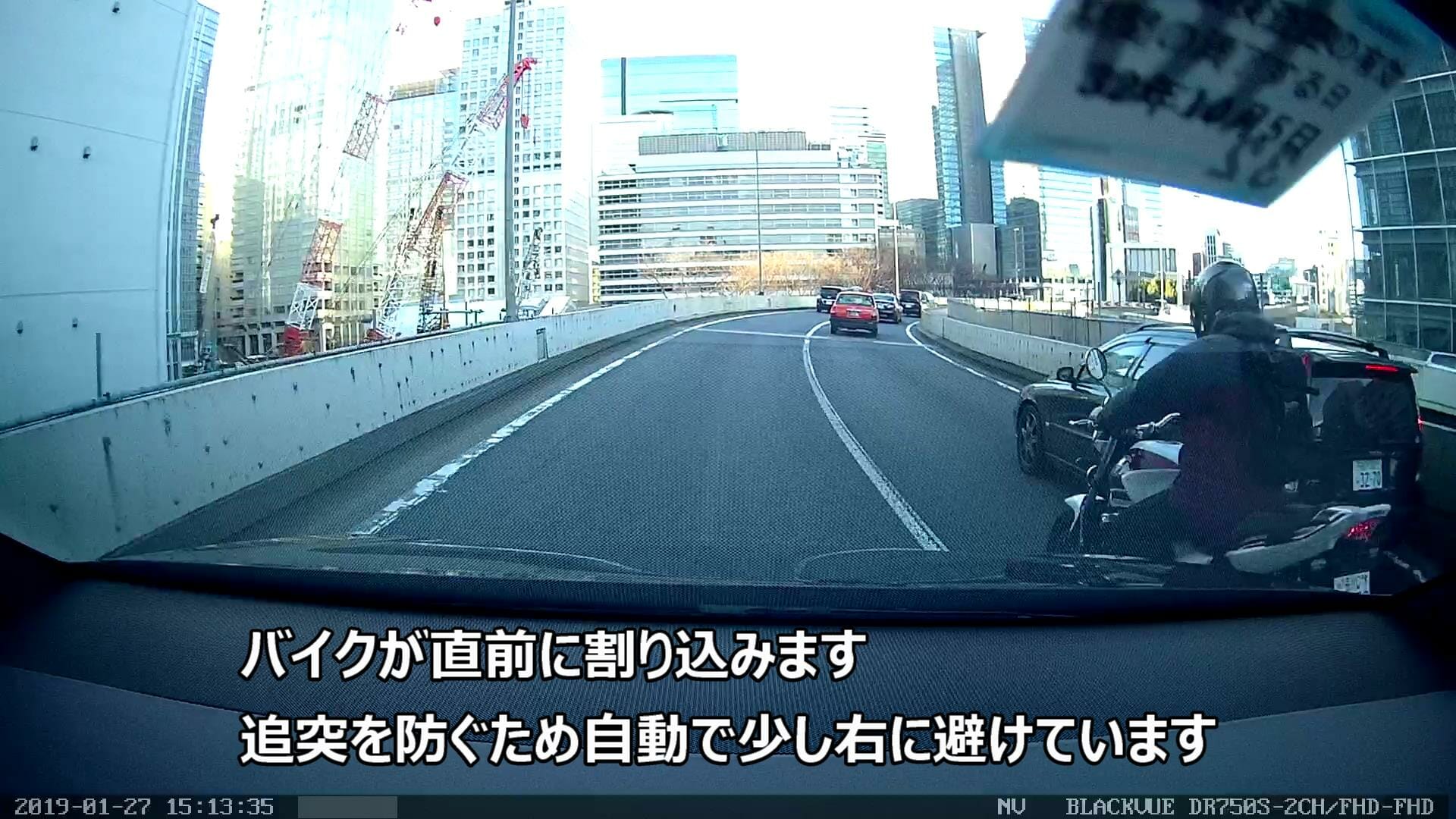
自動運転で首都高速一周:バイクの割り込み
問題の2か所とは、浜崎橋ジャンクション(内)と江戸橋ジャンクション(内)。これらの場所では走行車線から、左へ車線変更してランプに入り、その後右へ合流しないといけません。現時点での日本におけるテスラのオートパイロットでは、ランプの乗り降りはサポートされていないのです。米国ではナビゲート・オン・オートパイロットという追加機能がすでにリリースされており、ランプの乗り降りも自動で走行することができるようになっています。高速道路の乗り継ぎは完全に自動化され、高速道路から降りる場合もランプを降りるところまで自動で走行してくれるわけです。
前回の一般道編の動画は2倍速でしたが、今回の動画はより細かい動きが見られるよう、通常速度にしました。収録中にたまたまバイクが直前に割り込んでくれたのですが、通常速度だとオートパイロットがどのタイミングでバイクを認識し、自動のハンドル操作がどのタイミングで行われたかなどまで見ることができます。12分を超える長い動画になってしまっていますが、その代わり!ほとんど首都高走らない方向けに、各分岐・合流ポイントの説明をテロップで入れてみました。








コメント
コメント一覧 (3件)
ありがとうございます。
本当ですね・・・ゲリラ豪雨的な降り方ですが問題ありませんね。流石です。
日産のプロパイロットが雨でキャンセルされる動画を見ていたので関心がありました。
これであれば、高速道路は安心感高いですね。
いつも貴重な映像ありがとうございます。
次回は是非、オートパイロットの苦手なパターンの紹介をお願いしたいです。
または、今回と同じルートで「深夜の豪雨」や「強烈な逆光」でエラーが発生するのか否かでも結構です。
人間による運転が不安定になる状況下で、どの程度サポートしてくれるかが機会の真骨頂だと思いますので、是非お願いします。
aoponn様、コメントありがとうございます!
苦手なパターンですね。今のところ分かっているのはとにかく速度とカーブ、真横からの割り込みだと思います。逆に雨や逆光は結構強い気がしますよ。
https://blog.evsmart.net/tesla-model-x/roadtrip-tokyo-fukui-3/
↑こちらの記事に結構強い雨の動画(12分30秒くらいから)がありますが、ほとんどブレがないです。
首都高とかでこのくらい雨が降るとみんな速度を落としちゃうから、オートパイロットにとっては楽勝なんではないかなと。。
深夜の豪雨は新東名などで経験がありますが、これも特に苦手な印象はないです。
例えばオートパイロットで難しいところは大橋ジャンクションなどです。
YouTubeには制限速度の40km/hで走行できている動画はありますが、これを50km/hとかにすると途端に難しくなっちゃいます。
今度走行する機会があったら、50km/hで試してみますね。多分50でもバンバン抜かれちゃうと思いますが(笑)