



テスラモデルXに最初のソフトウェアアップデートが来ました。車のソフトウェアがどのようにアップデートされるのか、また今回のアップデート内容についてご紹介します。
モデルSでは、所有している2年5か月間の間にソフトウェアアップデートが23回もありました。最初はバージョン6.2で始まり、最後は8.0になりました。アップデートにより、坂道発進アシスト機能やナビゲーション、そして私の車はハードウェアが対象車種ではなかったのですが、オートパイロットV1が使えるようになりました。

テスラモデルSのソフトウェアアップデート履歴
日本に入ってきているモデルXはすべて「ハードウェア2」対応。ハードウェア2とは、テスラいわく、完全な自動運転を可能にするためのハードウェアだそうです。ただしハードウェア2がリリースされた時点では対応するソフトウェアは未完成の状態。そもそもソフトウェアができていないのに、ハードウェアを先にバージョンアップすべきなのかどうか疑問に思う方もいらっしゃると思います。ハードとソフトと両方揃ってから販売すればよいのですからね。
しかしテスラには年式という概念がありません。そしてハードウェアの開発のほうがソフトウェア開発より早くできる、という点を考慮しなければなりません。例えば2017年1月に納車になった私のモデルXには、「ハードウェア1」を搭載して、最初からオートパイロット(自動運転支援)を含むすべての機能を利用できる状態で販売することもできたはず。それが一般的ですよね?ところが、それはユーザーである私のためになっているのだろうか、と考えてみると、テスラは面白い選択をしていることに気づきます。つまり、納車された時点でソフトが完成していないためにすべての機能が利用できなくても、ソフトがバージョンアップさえできれば、車が時代遅れになる時間を遅らせることができるのです。ハードウェア2を搭載しておけば、最初の数か月間いくつかの機能が使えなくても、将来的には、現時点でのオートパイロットV1すなわちレベル2運転支援を大きく超える、レベル3やレベル4に近い車にアップデートできる可能性が高いのです。
納車時点でハードウェア2対応車では以下の機能が利用できませんでした。
- 自動緊急ブレーキ
- 正面衝突警告※
- 側方衝突警告※
- オートハイビーム
- オートパイロット(レーダークルーズ※、自動レーンキープ、自動車線変更)
- エンハンストオートパイロット(高速道路の乗り降り機能が追加)
- オートヘッドライト※
- (もちろん未完成)完全自動運転

テスラのソフトウェアアップデート通知画面
昨日のアップデート後は、上の※印の機能が使えるようになりました。オートヘッドライトは普段使っている人には、その機能がないと非常に不便で、これが私にとっては一番うれしかったかも知れません。ハードウェア1対応車の場合はオートヘッドライトはセンサーが別途あるそうなのですが、ハードウェア2対応車ではセンサーはなく、オートパイロット用のカメラを使って明るさを検出しているからだそうで、本当に機能が実現される仕組みまで数か月単位で変更してしまうスピードには驚きます。
「今すぐインストール」をクリックするとカウントダウンが開始される
欧米ではすでにハードウェア2対応車にもオートパイロットが配信されているのですが、日本はまだです。しかし、欧米で「オートヘッドライト」が搭載されたソフトウェアのバージョンで、オートパイロットがシャドーモードで搭載されていたらしいのです。これはどういうことかというと、オートパイロットすなわち運転支援機能は、基本的な車両・歩行者・車線や標識の認識アルゴリズムのほかに、深層学習(ディープラーニング)による学習データを使っているのですが、この学習データを蓄積するモード(=シャドーモード)のソフトウェアが入っていたということです。つまり、欧米では、このバージョンが配信されたあと、いったん全ハードウェア2対応車両をシャドーモードという、データを蓄積はするが実際に運転は人間にさせるモードを活用することで、短期間に膨大なデータを収集して学習させたと考えられます。推測ですが、日本でもこのシャドーモードが機能している可能性は充分にあると思います。もしそうなら、次回以降のソフトウェアアップデートでオートパイロットが使えるようになる可能性が高いと言えるでしょう。
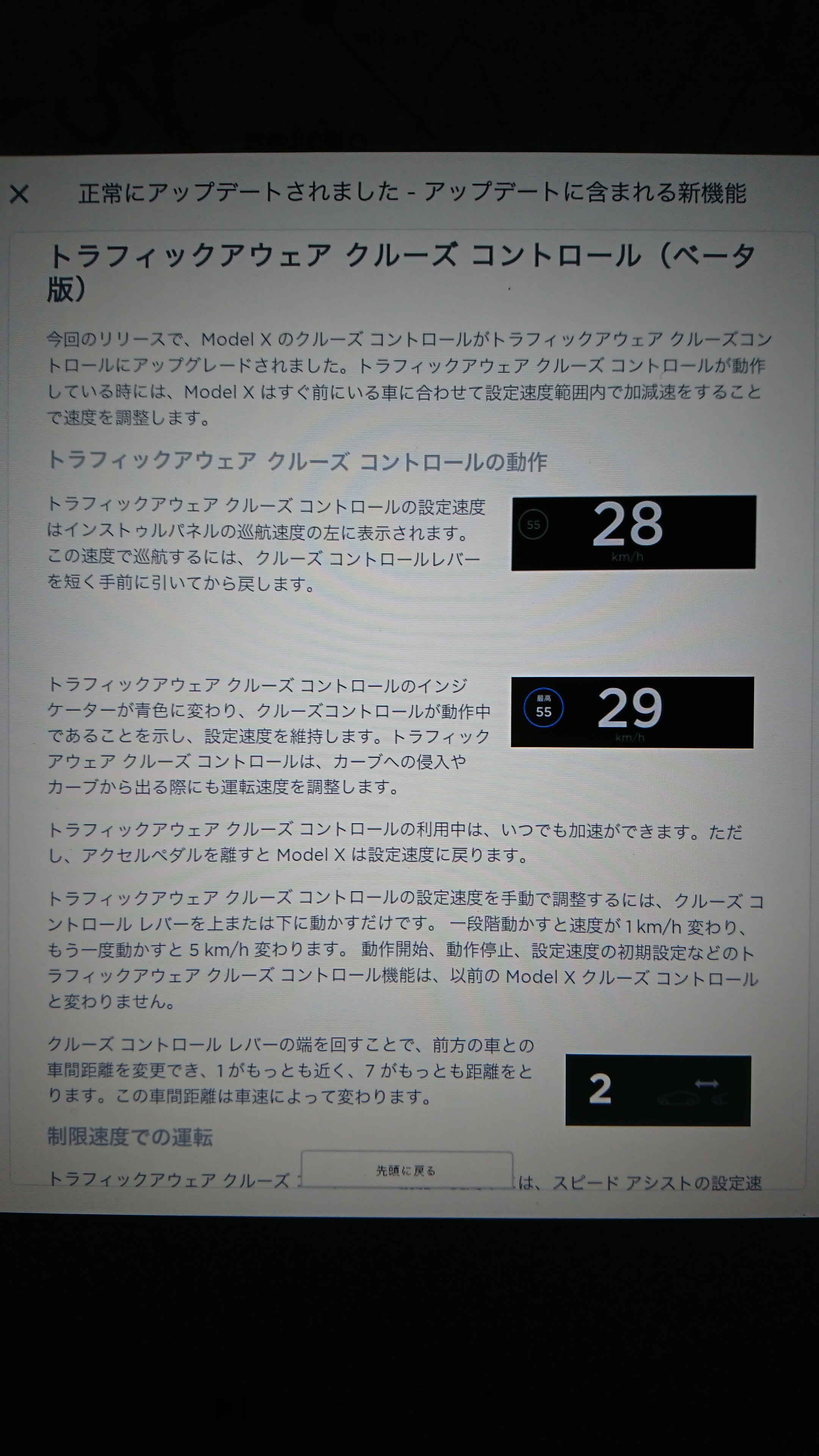
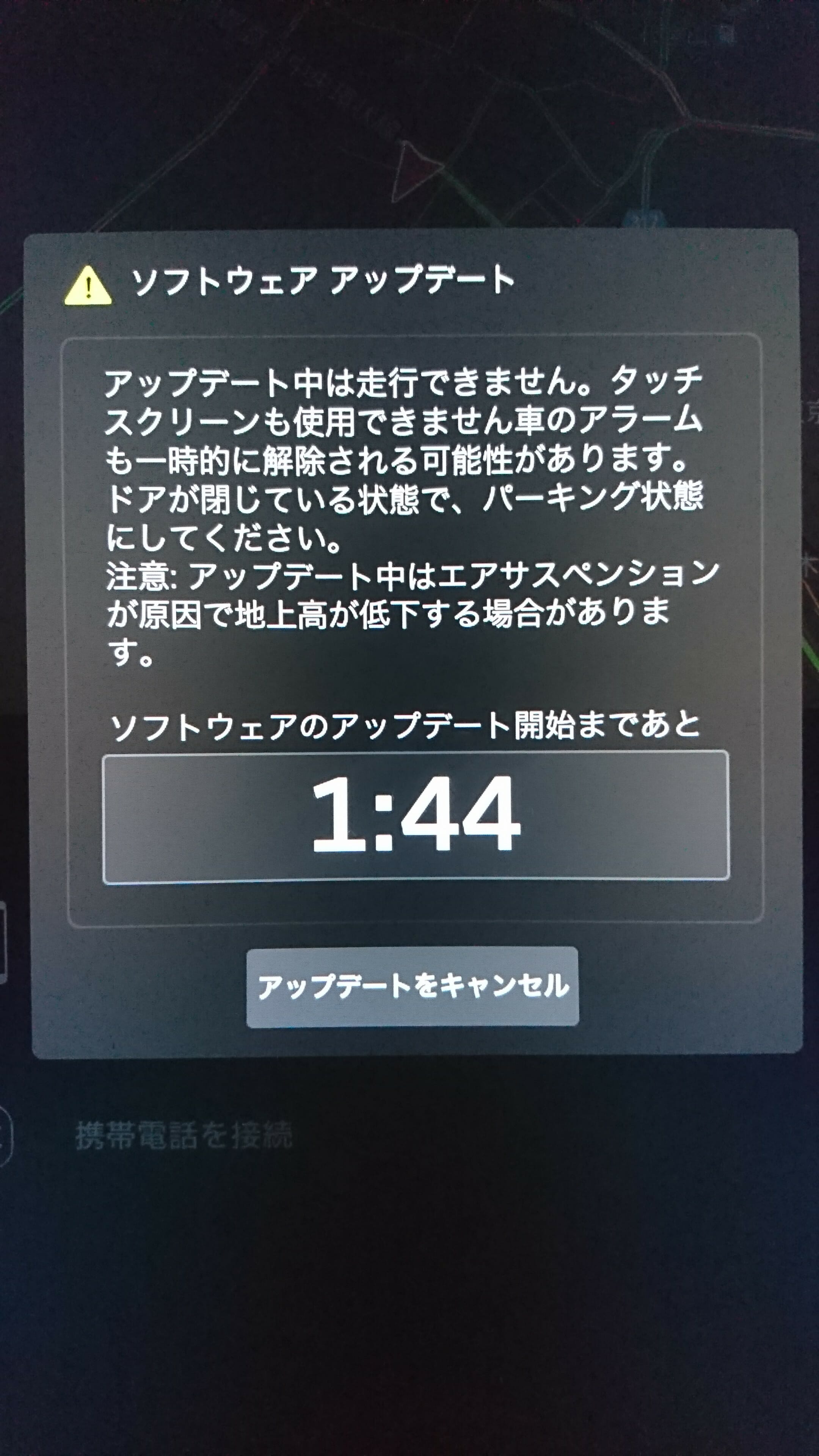
TACCの日本語リリースノート部分
そういうわけで個人的に今回のアップデートの目玉は先ほどご紹介したオートヘッドライトと、レーダークルーズです。レーダークルーズはテスラではトラフィックアウェアクルーズコントロール(TACC)と舌を噛みそうな名前で呼んでいるのですが、いわゆる前車追従型のクルーズコントロールです。ただこれ結構機能がてんこ盛りになっていて、癖があるんですよね。ソフトウェアアップデートのリリースノート部分(更新履歴みたいなものですね)のスクリーンショットを左に貼っておきますので、ご興味のある方はご覧ください。私もまだなかなか理解できていない部分があるのですが、TACCの使用方法について、一覧表にしておきたいと思います。もし間違っていれば、後日ここを訂正します(2017年2月8日現在)。
| 操作 | TACCオフのときの動作 | TACCオンのときの動作 |
|---|---|---|
| 軽く引いてすぐ離す | システムが認識している制限速度にあらかじめ設定したスピードアシスト機能の値を加えて(例:制限速度50km/hに+5km/hで55km/hなど)TACCを設定する | TACC設定速度まで速度を戻す |
| 上/下にワンクリックだけ上げて/下げて戻す | 現在の走行速度でTACCを設定する | TACCの設定を1km/hだけ速く/遅くする |
| 上/下にいっぱいまで上げて/下げて戻す | 現在の走行速度でTACCを設定する | TACCの設定を5km/h刻みで速く/遅くする |
| 先端のダイヤルを回す | 何もしない | 車間距離の設定を1から7までの7段階に設定。設定値は秒数なので、速度により車間距離は変動する |
| 軽く向こう側に倒す | 何もしない | TACCを解除する |
| ブレーキを踏む | 何もしない | TACCを解除する |








コメント