



新東名高速道路の駿河湾沼津SA=浜松SA間で、レベル4自動運転トラックの実証実験が始まりました。EVトラックではないですが、電気自動車で省エネ運転する方が利用することの多い左側の車線が自動運転車優先レーンとなるので協力しましょう。
第一通行帯が自動運転トラック優先レーンに
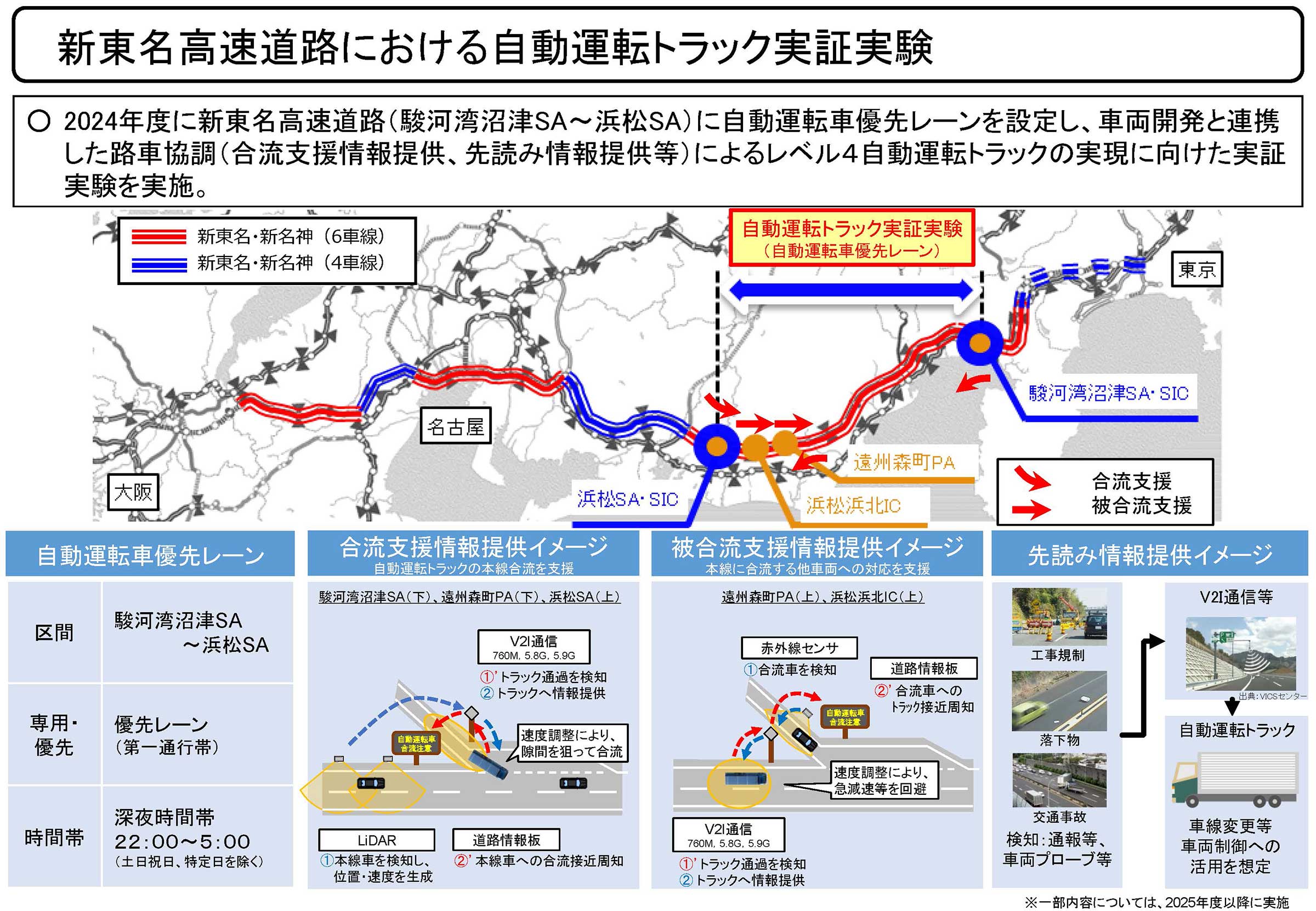
2025年3月3日より新東名高速道路の駿河湾沼津SAから浜松SA間において、自動運転トラックの実証実験が開始された。一般車も走行する高速道路を使っての実証実験で、リアルワールドにおける自動運転のさまざまな課題の洗い出しが目的だ。
出典:国土交通省プレスリリース
実証実験は午後10時から翌日の午前5時までの間に、第一通行帯(1番左側レーン)を自動運転トラックの優先レーンとして行われる。この時間帯が選ばれたのは、トラックは夜間に幹線部分で荷物を移動し、その先で細かい配送先に配られることが多く、現実に即しているからと説明された。
自動運転に関する政府の取り組みには商用車と自家用車という2つのアプローチがある。商用車の方はいわゆる物流サービスだとか、地域の移動サービス地域のバスのような特定のルートとか特定の目的のために自動運転がされルートが限られてくるものは難易度が低い傾向にあり、実現に向けての動きが速い。一方で自家用車については、特定のルートとか地域を限定しないのでかなりレベルが高い技術が求められる。

出典:国土交通省説明資料
将来的には商用車と自家用車での成果を掛け合わせたものが、究極の自動運転社会であると言われている。自動運転についてはレベル1から5まで定義されている。レベル1については運転支援と言われるもので一般的に実用化されている。レベル3以上は特定の条件下とか特定のルートなど、まずは地域を限定するといった条件が付随されるものの、運転支援ではなく自動運転となってくるので、今現在は、政府全体で取り組みが進められている段階である。
政府の目標としては、(無人で運用できる)レベル4自動運転移動サービス、例としては地域のコミュニティバスのようなものを2027年度までに100ヶ所以上にするという目標がある。
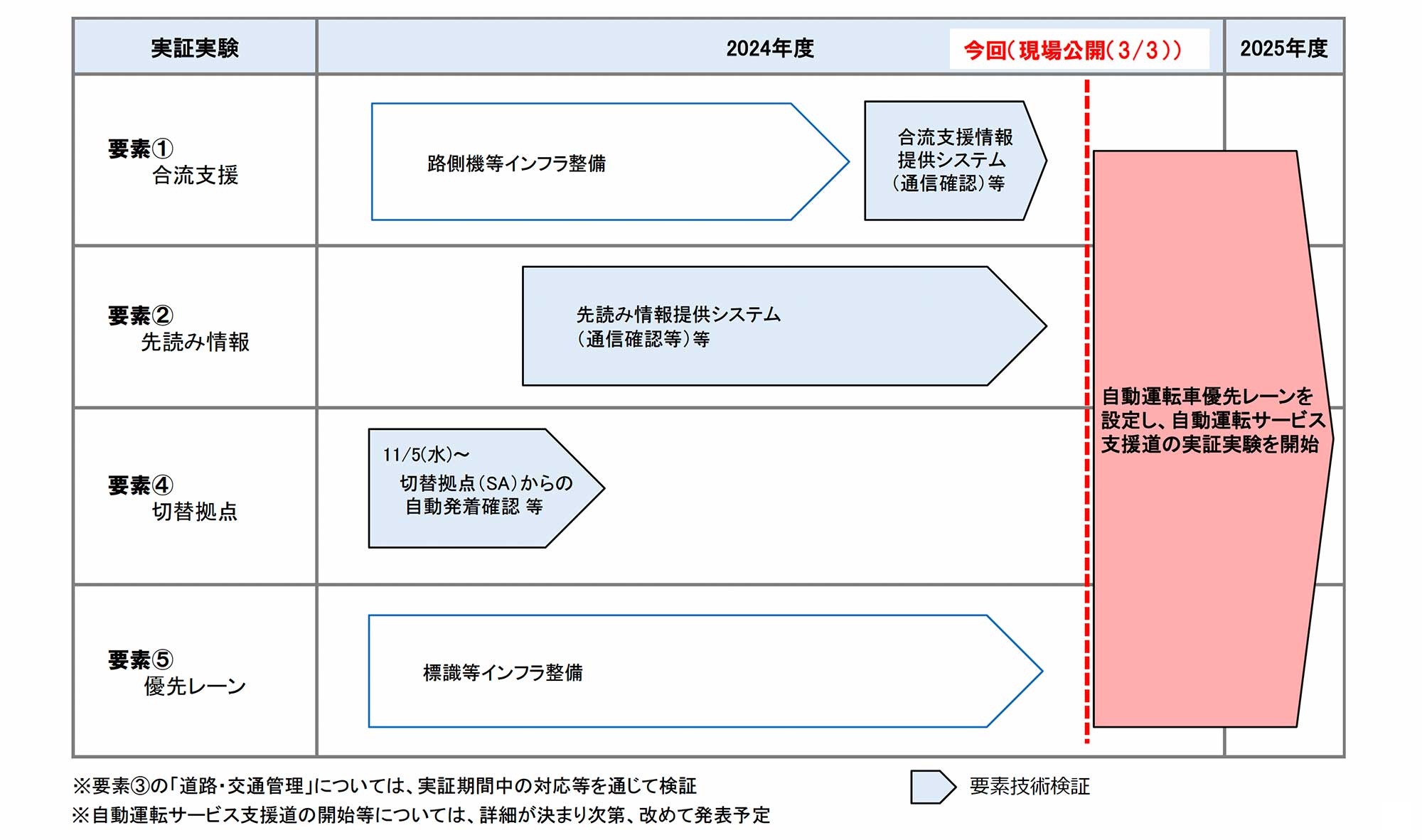
一方で実証実験が開始するトラック(物流関係)のレベル4自動運転について、2025年度以降の実現をめざし取り組みを進めていく。国交省道路局では、今回新東名でインフラ支援の実験を行って以降、東北自動車道などでも取り組みを進めていく計画という。
今回実施される新東名の自動運転トラックの実証実験に向けて、「高速道路の自動運転サービスに求められるインフラ支援」について、すでに整備が進められてきたことも説明された。
出典:国土交通省プレスリリース
具体的には、以下のようなポイントがある。
●合流支援情報提供システム/自動運転車の本線合流を支援する情報提供システムの整備。
●先読み情報提供システム/自動運転車の円滑な走行(事前の車線変更など)を支援する情報提供システムの整備、AIカメラや車両データなどを活用した落下物などの早期自動検知。
●道路、交通管理/遠隔監視、運転手や保安要員の派遣など。
●切替拠点/自動運転の切替(ドライバー乗降など)に必要な駐車マスの整備。
●自動運転車優先レーン/優先通行帯などとその周知。
実験区間は新東名高速道路の駿河湾沼津SAから浜松SA間の約100kmで、この区間に各種の機器や管制センターなどが配備され実証実験を行う。

出典:国土交通省説明資料
自動運転のインフラ関係については国交省道路局と警察庁交通局、総務省総合通信基盤の3局がインフラ関係省庁として「自動運転インフラ検討会」を作り、ここに事務局が置かれ今後の支援方法などを検討していくとのこと。
自動運転トラックは優しく見守りましょう

私達が自動運転トラックと出会う可能性があるのは、新東名高速道路の駿河湾沼津SAから浜松SAの区間(上下線とも)で午後10時から午前5時まで。最も左側の第一通行帯が自動運転トラック優先車線となる。
実証実験の自動運転トラックは、側面や背面に「自動運転実証実験中」と明示。また正面や側面に緑色のLED識別灯が点灯している。走行スピードは法定速度である90km/hだが、規制速度が設定されている場合は規制速度(50km/h規制の際は50km/hで走行)となる。

実証実験中のトラックはレベル4状態で完全自動運転されているのだが、現段階ではドライバーが乗車して万が一の状況に備えている。つまり、レベル4の自動運転をレベル2で行っている状態だ。
EVも電費を重視した走りをする場合、第一走行帯を走ることが多いだろう。あくまで「自動運転トラック優先」で「専用」ではないので、この車線を走ることにはなんら問題はないが、速度が遅いとイライラしたり自動運転中のトラックの前をふさぐような走り方は避けて、優しい目で見守ってほしい。
現在、乗用車ではカメラなどのセンサーを使った自動運転(運転支援)が主流となっているが、大型トラックなどではそれだけでは制御しきれないということで、路側センサーからの情報を利用しつつの自動運転を目指すとのこと。乗用車系ユーザーには無関係かと思われがちだが、決してそのようなことはない。路側から提供される情報はSAから出る際のクルマの量であったり、先の障害物だったりするので、これらの情報を早い段階から入手できれば乗用車系ユーザーもそうした情報を生かしながらの自動運転が可能になる。
まずは大型トラックからスタートするだけであって、やがては乗用車にもその恩恵が波及してくることだろう。それを期待し、今回の実証実験に協力したいと思うのであった。
取材・文/諸星 陽一








コメント