


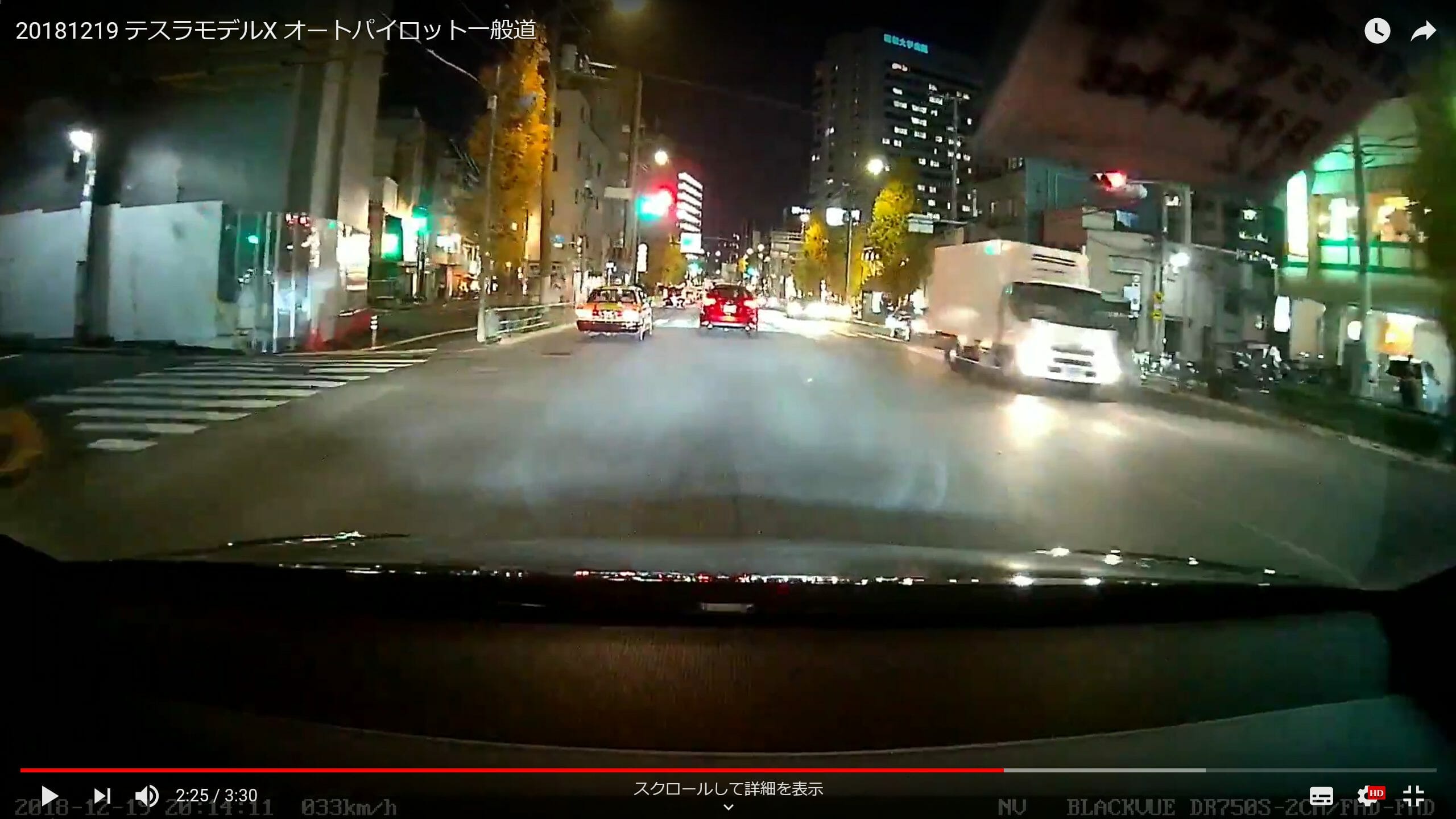
今回は電気自動車とは少し離れて、テスラのオートパイロットの最新バージョン2018.48.1での自動運転の様子をお届けします。高速道路じゃつまらない!複数車線の一般道です。
オートパイロットってどんなもの?テスラのサイトを見ても良く分からないですし、自分で運転したほうが楽しいし安心じゃん!と思われる方は多いと思います。この記事では、テスラがオートパイロットで、私が介入せずに(=運転操作をせずに車任せで走らせて)、東京では比較的広めの一般道を走らせる動画を見つつ、すでに市販されている車でこのレベルまで実現されていることをご紹介したいと思います。まずは動画ですね。
テスラのオートパイロットという機能は、レベル2自動運転に分類されます。これはつまり、車は自動的に走行できるが、運転者が常に運転を代わることのできる状態でスタンバイしていなければならないことを意味します。この動画の7分間の間、私はスタンバイしていましたが、「運転」はしませんでした。
オートパイロット、なかなか上手じゃないですか?高速道路ならカーブもきつくないし、車線も曲がりくねったり、交差点みたいに途切れたりはしないのですが、これだけの距離を制限速度内とはいえ、前の車との車間距離を適切に保ちつつ走行できています。実際には現時点で赤信号の認識や車線変更はできない(高速道路上では、ウィンカー操作だけで自動車線変更も可能です)わけですが、比較的広い道なら車線キープでこれで充分なのです。
自動運転じゃ運転の楽しみがない?オートパイロットはいつでもオフにできますし、オンにもできます。運転を楽しみたい場所ではオフにして、毎日の通勤や高速道路の渋滞などではオートパイロットをオンにすれば、かなり自動的に走行してくれます。そして、オートパイロット中は非常に疲れが少ないです。
自動運転が疲れを軽減する理由はなぜでしょうか?私はその理由をいろいろ考えていましたが、二つあるように思います。一つは、細かい運転操作が必要ないことです。前の車が加減速することにより合わせて車間距離を適切に調整。道がカーブしたり車線が移動すればそれに合わせてハンドルを調整し、大まかに車線の間に車が収まるように調整。運転とはこの操作を継続して行い続けることなわけですが、オートパイロットではこれは車が勝手に実行してくれます。
もう一つの理由は、これは精神的なものの気もするのですが、オートパイロットは自分じゃない、ということです。誰しも、前の車が比較的急なブレーキを踏んだり、後ろの車が車間距離を詰めてきたり、横の車線の車が比較的狭い車間に割り込んできたり、という経験がおありだと思います。その時にプロドライバーでない我々はちょっと嫌な思いをしつつもその状況に安全に対応するわけですが、オートパイロット中にこのようなことが起こった場合、何となく自らは傍観者であるかのように感じています。つまり、割り込まれたのはコンピューターであって、自分じゃないのです。「あーあそんな無理に割り込んじゃって」という感じ。皆さんはバスに乗っていて直前に無理に割り込まれても腹は立たないですよね?それと同じではないかと思うのです。
このテスラのオートパイロット、以前の名古屋ノンストップでは300kmくらいを自動で走行しています。一部オートパイロット用の地図が古い場所があるため、十分な速度が出ない区間は手動運転に切り替えて運転しているため全線を自動運転、というわけにはいかなかったのですが、今後地図がアップデートされればおそらくほぼ95%の距離を自動で走行できるようになると思われます。高速道路では、もう充分すぎるほど実用になっているのです。
今後、高速道路のインターチェンジの乗り換え、一般道での信号の認識、右左折、路上駐車・バイク・自転車等を含む障害物をスムースに避ける、工事区間の対応などができるようになれば、少なくとも悪天候ではない通常の移動はものすごく楽になると思われます。テスラは1か月に1-2回、OTA(無線)でオートパイロットのソフトウェアをアップデートしてきていますので、今後大きな変化があればまた記事にしたいと思います。
※2019/1/31追記:首都高速編もアップしました。








コメント
コメント一覧 (5件)
カメラにしてもLiDARにしても短波レーダーにしても、自動運転の能力はセンサーからの入力データに対する取捨選択のパラメーターが全てだと思うので、発展途上の現在は各社の思想がそのまま体感できるので面白いと思いますね。
テスラはアップデートでパラメーターが大きく変わるので、今まで制御が良好だった道路も、アップデートした途端にダメダメになったり、ダメダメだった場所がまあまあになったり、変化が面白い。そんな進化も劣化もするところがテスラの優位性ですね。
僕のはVer2.0のごく初期のハードウエアですが、最初はACCすら実装されていなかったのに、まあよくここまで変化(進化)したなあと感心しています。
いつも素晴らしい記事をありがとうございます。
私自身もBEVとdrivingAIの組み合わせの魅力に大変惹かれている人間の一人で、初期の頃からずっとこちらのブログを拝読していますが、初めてコメント致します。
日本国内での最新テスラAP programの動画を拝見し、大変わくわくしました。
在豪邦人のYoutuberの方のテスラ関連channelで以前APの動画をみたときは、交差点内で白線が途切れた際の挙動に少し不安を覚えましたが、この動画を見るとその点に関しては大分克服出来ているように感じます。信号認識と障害物回避機能が付けば、バイパスや幹線道路などで直進するだけならばほとんど問題ないレベルに達しそうですね。
ただ、やはり個人的にはさらなる自動運転の安全向上を目指すのであれば、LiDARの搭載が必要なのではないか?と感じています。以前Elonは「最高のドライバである人間は視覚で運転しているからカメラがあれば十分だ」という発言をしていたと思うのですが、その人間ですらときには視覚の不備で事故を起こしてしまうわけで、是非ともテスラ社にはカメラ単独に固執せず、LiDAR価格が現実的になった際には搭載を検討してもらいたいと考えています。
また、将来的には、カメラや演算チップのモジュールなどを簡単に換装して、より大量の映像情報を高速で処理して安全な運転が行えるようになるような設計思想を盛り込んで頂きたいと考えています。
Yasukawa様の考え等コメント頂ければ幸です。
りりー様、私は専門家ではないのでLIDARの必須性については判断できませんが、あるかないか、という意味ではあったほうがいいのではないでしょうかね?問題はコストと、故障しやすさと、あと流石に市販車で屋根につけるわけにはいかないですから、バンパー内で充分な性能が得られるのか、というあたりなのではないでしょうか。
LIDARはポイントクラウドを返すんですよね?それが時系列でどんどん変化していくのを追っかけるものと認識しています。ポイントクラウドが障害物を「見分ける」能力は、カメラのイメージデータよりは低いのではないでしょうか。ポイントクラウドだと、そのものの形がぼんやり分かるだけなので、障害物の疑いのあるものをリストはできますが、確実性高く判定するのは難しいのでは?Waymoも、物体の判別は画像とNNを使っていたと思います。
道の形や後方や側方から迫りくる「何か」はLIDARのほうが得意だと思うので、併用できるなら併用したほうがいい気もします。
動画拝見しました。私もテスラオーナーですが、確かにオートパイロットは素晴らしい機能です。
しかし交差点内では間違えることが多く、動画内のように右折レーンを認識しつつ、真ん中の直進レーンを認識することは、私は未だに体験していません。2車線から交差点先が3車線になる(またはその逆)もよく間違えます。
だからといって「良くない」と言うことではなく、その程度の間違えしかしないと言うことです。その辺のミスも今回の動画でお伝えいただければ嬉しいです。
いつも楽しく拝見させていただいてます。
これからもタメになる記事等よろしくお願いします。
さくら様、コメントありがとうございます!そうなんですね、多分道によるのかもしれないです。私の経験では間違えることはなんか少ない気がします。
もしかしたら左右に車がなかったりするのでしょうか?それで判断しているから、私の場合はほとんど間違えないのかもしれませんね。