


最新版ファームウェア(2019年7月9日リリース)で自動運転に違いが感じられるか?テスラモデルX バージョン2019.24.1で都心環状線を一周、ほぼ介入しないで自動運転走行してみました。動画はドラレコのものを通常速度でつないでいます。
過去記事もよろしければどうぞ:
- 2018年12月19日 中原街道下り <一般道編> ファームウェア2018.48.1
- 2019年1月27日 都心環状線内回り <首都高速編その1> ファームウェア2018.48.12.1
- 2019年2月24日 都心環状線外回り <首都高速編その2> ファームウェア2018.48.12.1
- 2019年3月10日 中央環状線内回り <首都高速編その3> ファームウェア2018.50.3
- 2019年5月6日 都心環状線外回り <首都高速編その4> ファームウェア2019.12
前回のバージョン2019.12から3か月余り、途中に2019.16.1.1を経てやっと7月バージョンの最新ファームウェアにアップデートすることができました。なんかゲームが増えていますがやらないので興味なし(汗
初めてこのシリーズをご覧になる方へ:
テスラのオートパイロットは、テスラがすべての車両に標準搭載(一部オプション)しているレベル2自動運転機能の名称です。これはドライバーが自身で運転しているときと同様、周囲に注意を払い、いつでも運転を代われる状態であることを条件に、車が基本的な運転操作を自動で実行してくれる機能です。レーン内の位置の保持や加減速などを自動で行ってくれるため、ドライバーにとってはかなり楽で、疲れが激減します。
自動車線変更機能は、エンハンストオートパイロット(EAP)という有料オプションを追加している車両のみで使用でき、ウィンカーレバーをちょんと右か左に軽く倒すと、その時点から車が自動的に指示された方向の車の流れを監視し、ウィンカーを自動的に点滅させながら安全に車線変更を行います。指示されたタイミングから一定時間の間、車の流れが途切れなかった場合には、自動車線変更はキャンセルされ、今までいたレーンを維持します。車線変更に成功した場合には、ウィンカーは自動的に消灯します。
なおこちらの動画では、オートパイロットの設定速度は、車が全くいないときの自然な流れより若干遅めに設定して、走行中は変更せずに走行しています。手はハンドルに添えて、足はペダルから下ろした状態をキープし、車に運転させています。いつでも運転を代われるように監視しています。
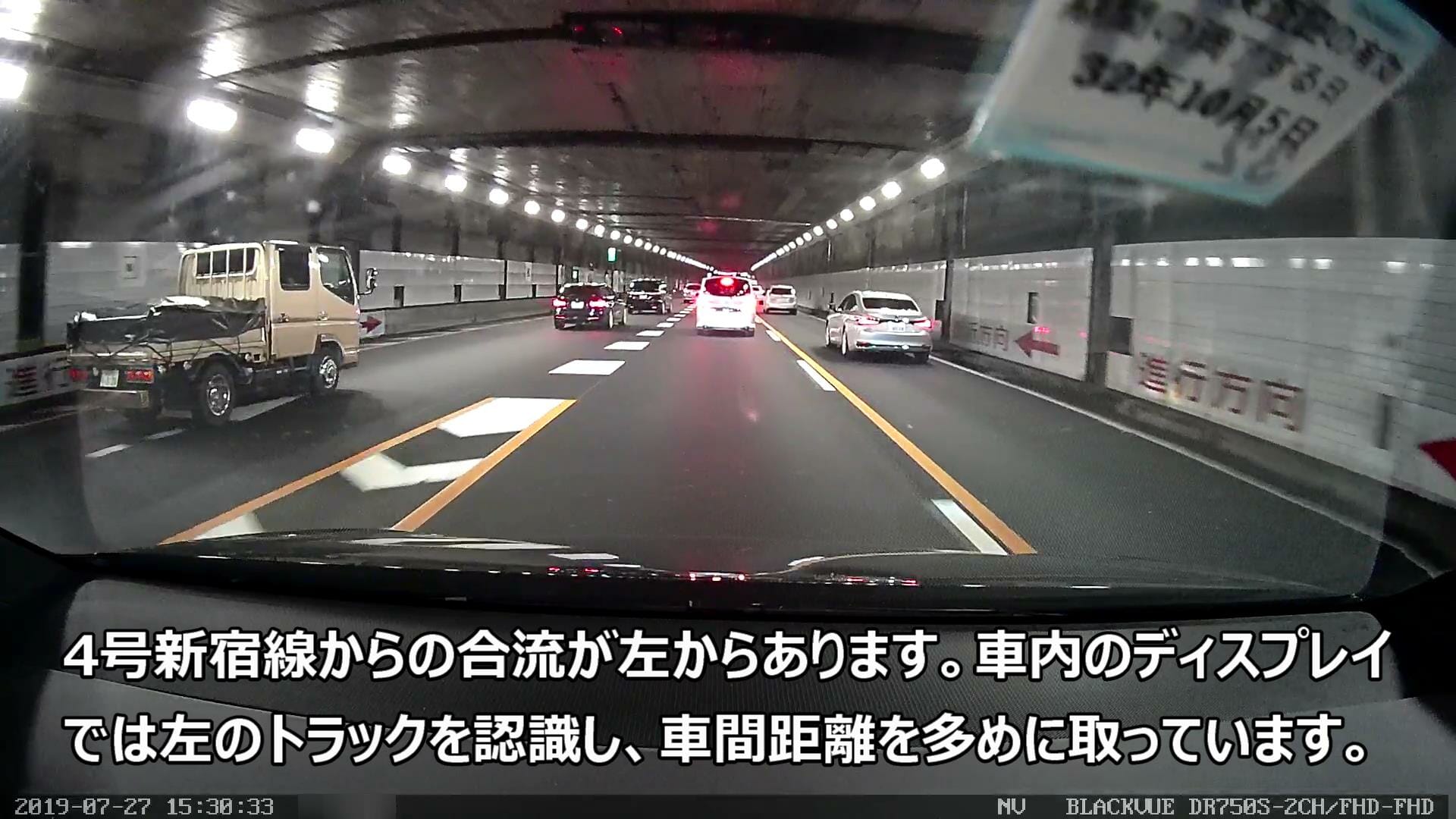
今回は竹橋JCT近辺から江戸橋JCT近辺まで渋滞があり、渋滞中の車の動きもご覧いただけます。以前のバージョンより、レーンの真ん中をより「正確に」維持できるようになり、また合流地点などでも以前より早く合流車を捉え、適切な車間距離を調整できるようになっています。
車線変更はすべて自動車線変更で行いました。したがって、今回の動画ではオートパイロット(自動運転レベル2)を解除せずに、ウィンカーレバーを操作するだけで都心環状線を一周できています。
では動画をご覧ください!








コメント
コメント一覧 (8件)
BMWに乗っています。
動画拝見しました。
テスラの場合、合流もお見事、急カーブもお見事ですね。
すでにレベル3に入っているような状況なのですね。
BMWの場合、オートクルーズとレーンアシストがくっついただけの状況で、多少前車追尾しますが>>>マークの急カーブではコースから外れてしまい、首都高ではそのメリットはあまり感じません。
あと、黄色線や太線や点線が脇についたような特殊車線の認識も下手です。
今回のマイナーチェンジでカメラ3つに増えたようですが、まだまだレベル2のど真ん中って感じでしょうね。
特にテスラのアップデート方式というのがたまらなくうらやましいですね。
自動運転技術に興味があり楽しく拝見させていただきました。
これまで見た、自動車評論家が出演・解説するどんな動画よりも参考になりました。
渋滞に適切に対応できているなど、進化を具体的に見ることができ感謝いたします。
テロップでの解説も理解のために非常に有用でした。
私としては、音楽は適切と感じます。やや単調な映像が続きますので、ある程度にぎやかさのあるBGMは楽しく見る助けとなったと感じています。音楽については、前にご指摘の方がおられましたが、この辺りは感覚の個人差があるのでしょうか。
ちなみに、Googleがこのブログ記事を私に推奨してきました。私の設定では、検索文字を入れる前に、私が興味を持ちそうな素材を検索文字入力欄下に表示します。
いつも更新楽しみにしております。
初歩的な質問なのですが、渋滞時等に完全停止した場合、停止保持と再発進に何らかの操作は必要でしょうか?
私の車のACCですと、完全停止までは車が自動でやってくれるのですが、その後は停止保持のため人がブレーキを踏み続ける必要がありますし、再発進時のためにはクルーズコントロールスイッチを(親指でボタンを押すだけですが)操作しなければなりません
次はEVにしたい 様、ご質問ありがとうございます。
この車の場合、まず停止の保持には何も要りません。車が勝手に停止を保持します。再発進の場合、もし停止中にバイクや歩行者が前を横切ったりした場合は、アクセルを一回軽く踏むことで再発進が可能です。また横切ったあとでも、少し時間が経過しており、確実にバイクや歩行者が進行方向にいない、と分かる場合には自動的に発進もします。例えば高速道路では、今回のようなケースでは毎回停止、発進は無介入で、すべて車がやってくれます。
その理由はなんですが、オートパイロットは通常のTACC/ACCと異なり、カメラで前方、側方の動画を撮影しつつ、それを深層学習によって人や自転車、バイク、車両などと判別して、進行が可能かどうかを判断しています。そのためレーダーのみのTACC/ACCと異なり、より確実に安全が確保できるので、それらが自動になっているのです。
再発進も自動でやってくれるのがテスラの良いところだと思います。もちろん停止保持には何もしなくてもOKです。
ACCには
1. 完全停止しない
2. 完全停止するけど再発進しない
3. 完全停止して何かしら操作すれば再発進もしてくれる
4. 完全停止して何も操作しなくても再発進もしてくれる
のタイプがあるかと思います。
テスラは4でして、レバーを1回引くACCモード(ハンドル操作は必要モード)でもレバーを2回引く自動運転モート(ハンドル操作不要モード)でもやってくれます。
> Yasukawa様
自動的に発進”する時”と”しない時”があったので何故かと思っていましたが、お陰様で判明しました。
横切った時などに一時的に「保留」されるのですね。
私は「ハンドルを強く握っていなかった」から「保留」モードになったと想像していたのですが間違っていたみたいですね。
あまり記憶は無いですが、たぶん渋滞で停まっている時にバイクが横切ったかもしれません。
↓保留モードの写真
https://wp.me/paGcvs-re
安川様、EV歴9年目様
丁寧にお答えいただき、ありがとうございます。
やはり自動で停止保持・再発進までやってくれる車両の方が、便利さは格段に高そうですね…
なんでこういう騒がしい音楽つけるんですか?映像の雰囲気と違いすぎ。
Yamaha takao様、うるさかったですか(汗 今度はもっと静かな曲にしてみます。