



2021年8月20日に開催されたテスラ『AI Day』は、完全自動運転技術の進捗や近未来に関する踏み込んだ内容でした。翻訳家でテスラオーナー、またこうした技術にも明るい池田篤史氏はAIに関する素晴らしいプレゼンテーションだったと評価。池田氏による翻訳版のサマリーレポートをお届けします。
【アーカイブ動画】
Tesla AI Day(YouTube)
※冒頭写真はアーカイブ動画より引用したテスラ・ボット『オプティマス』のイメージ
3次元での認識
テスラでは技術的に大きな躍進があったり、構想が具体化すると、〇〇Dayと銘打って発表する場を設けてくれます。自動運転のAutonomy DayやバッテリーのBattery Dayなどに続き、日本時間の8月20日にテスラはAIの成果を披露するAI Dayを開催しました。
はじめにテスラの上級AIディレクター、アンドレイ・カルパシー氏が登壇し、彼が4年前にテスラに入社してから現在に至るまでの進化について語ります。
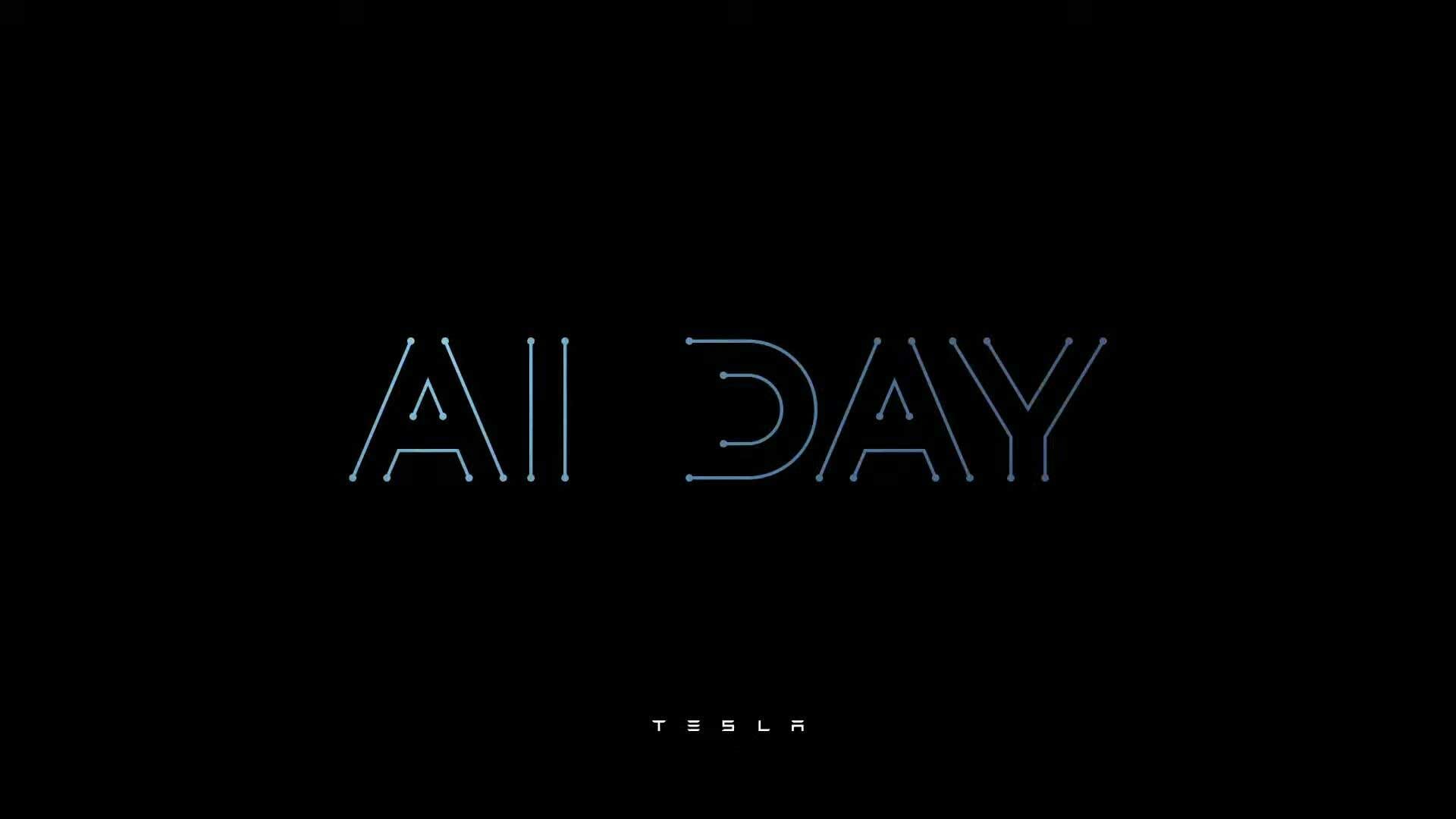
以前のAIチームはカメラの画像(2次元)に写っている他車や縁石などを認識して、各要素を1つのベクトル空間(3次元)に投影していたのですが、遠くのものやカメラの継ぎ目に写っているものは不正確になり、周囲の環境を適切に把握することができませんでした。そこで、8つのカメラの出力をまず1つの画像に統合し、ベクトル空間の中で直接、物体を認識するようにしたのです。
上の写真がカメラからの2次元の画像、左下がこの情報をベクトル空間に投影したもの、そして右下がベクトル空間で直接車線を推定している様子。出典:テスラのアーカイブ動画より引用(以下同)
このベクトル空間には8つのカメラの情報以外に自車の運動データ(速度など)と時間のデータ(少し前の記憶)も統合されており、「さっき右折レーンの表示があったから私は今右折レーンにいる」とか、「さっき見えていた道は今、隣のトラックで見えないけど、自車がこれだけ動いたから縁石はこのあたりにあるだろう」という推論も正確に行えます。
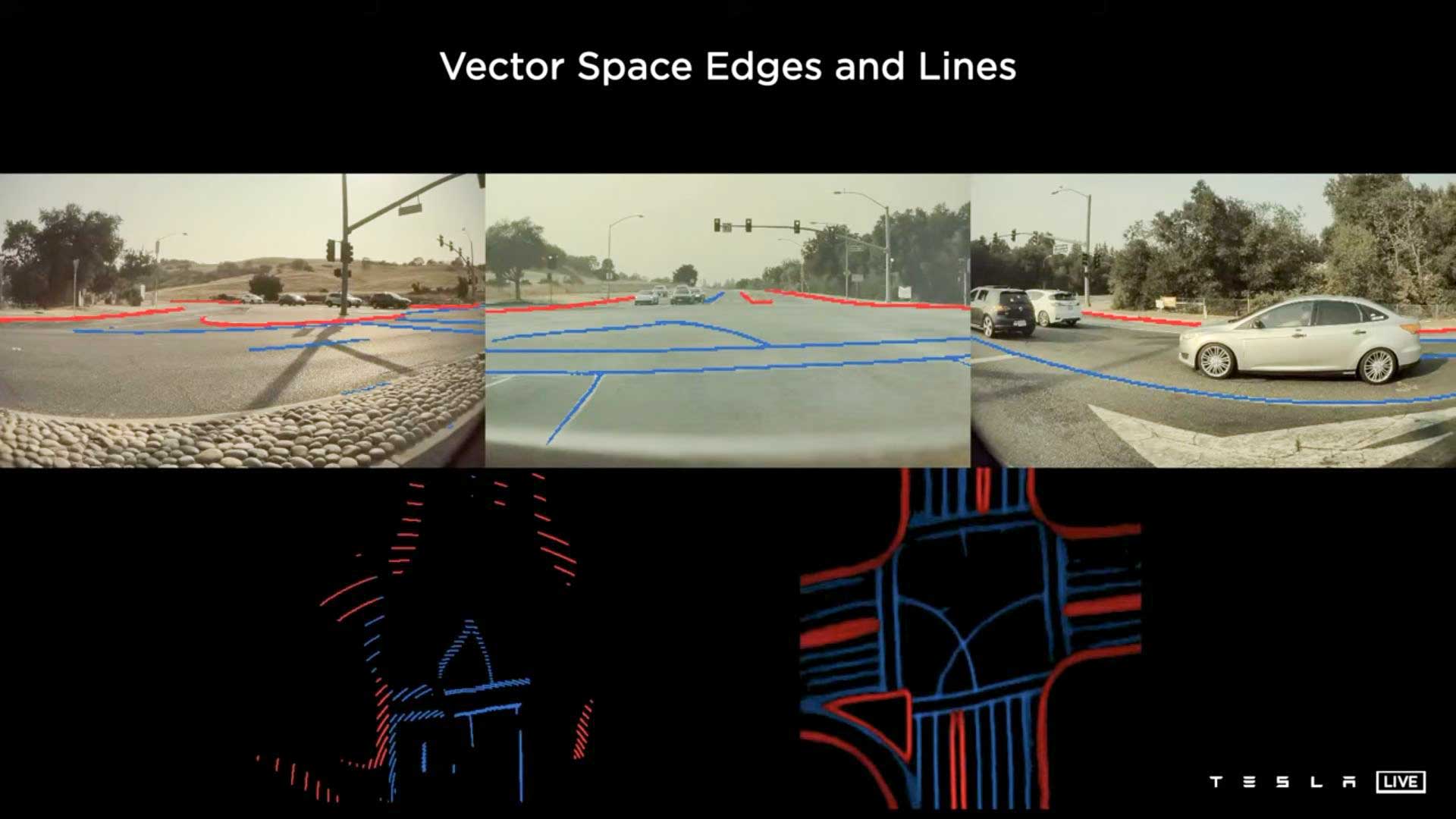
ここで重要なのは、大量のカメラ画像から必要な点だけ抜き出してデータを軽くし、ベクトル空間で高速推論できるということです。車両に搭載されているFSDコンピューターは消費電力の制約や瞬時に正しい判断を迫られることから、軽快に動作することが大切です。その軽快さが市街地でのAP(オートパイロット)に活きるというのが以下の2例です。
まず1つ目が10秒間で2度車線変更をして左折レーンに入る経路計画を行うというものです。複数の手法を組み合わせて1.5ミリ秒の間に2,500通りの経路を試し、最も安全かつスムーズな答えが導き出される様子が分かります。
状況の変化にも超高速で対応して判断
この経路計画は自車だけでなく、周囲のオブジェクトも計算に含め、他車や歩行者と協調した運転を行うために使用されます。これは動画じゃないとうまく伝わらないと思いますが、下図の状況はこうです。
路駐の多い細い道で向こうからトラック①がやってきて、その挙動を観察しながら、自車は「①が譲ってくれているので進もう」と判断をします。すると、①の背後からもう1台の乗用車②が勢いよくやってきます。自車は「あのスピードだと②は突っ込んで来そうなので、こちらが止まって譲ろう」と判断します。しかし、②が急にハンドルを切って道を譲る素振りを見せるので、自車は「やっぱり②は譲ってくれたので、こちらが先に進もう」と判断を変更します。
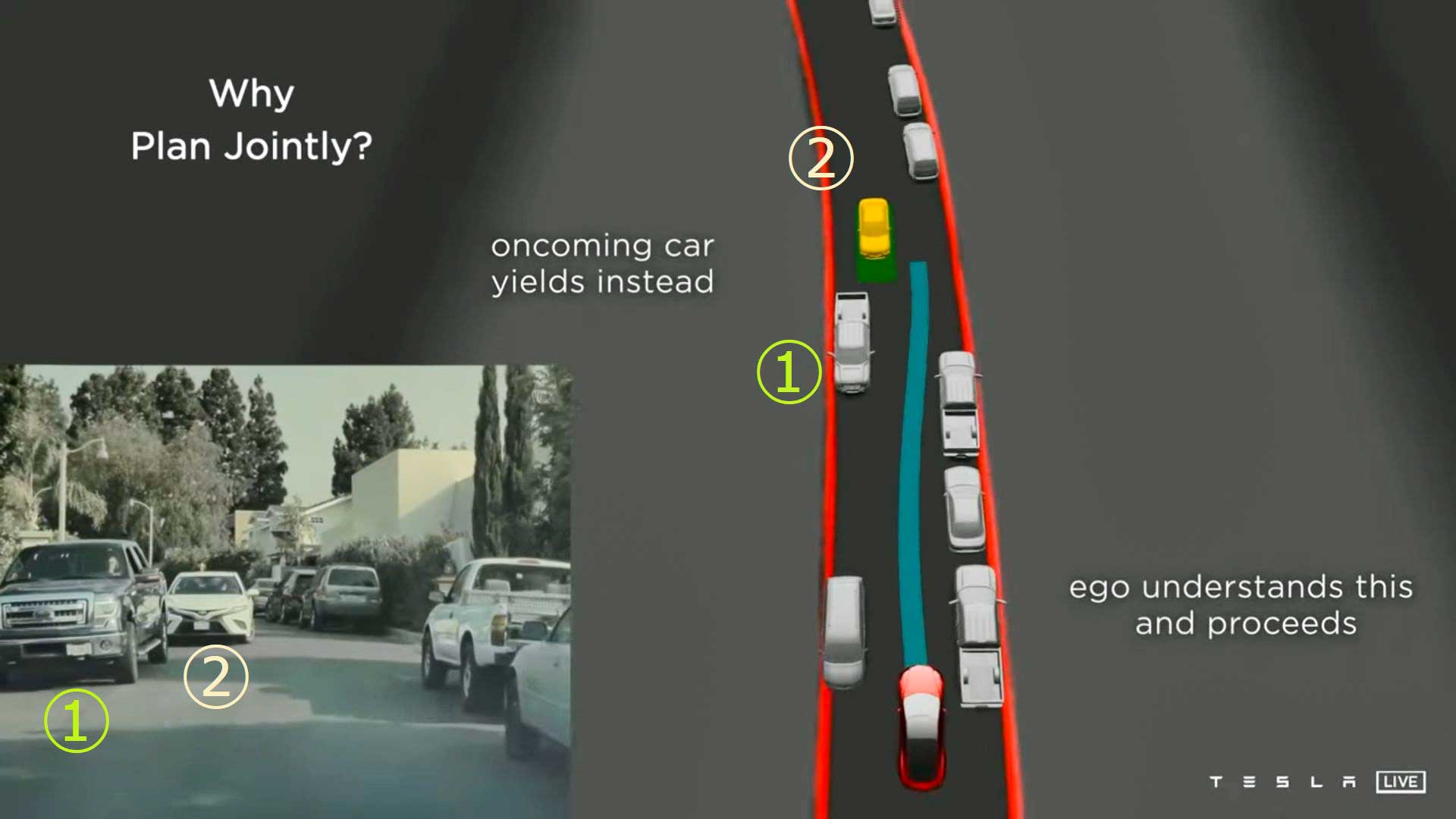
ひと昔前の自動運転だと、相手がいると消極的になってしまい、①や②が現れるとその場に停車して相手が通り過ぎるまで待ち続けてしまいます。しかし、相手を含めた経路計画を超高速で行えるため、状況に応じてイニシアチブを取るなど、より自然な運転ができるようになりました。
ラベリング
ここまでは車に搭載されたコンピューターがいかに素早く正しい判断を下せるかについて話してきましたが、そうしたアルゴリズムを作るには、テスラ本社にあるスパコン(関連記事にリンク)を使って膨大なデータセットから学習する必要があります。
データセットを作るには、カメラの画像に写っているオブジェクトをラベリングしなくてはなりません。画像を見て「これは車、これは人、これは停止線」と説明を加えて何百万枚もAIに見せることで、特徴を捉えられるようになります。
カルパシー氏が入社した頃にはラベリング会社に外注をしていたのですが、これでは納期も遅くパフォーマンスも悪かったため、社内に1,000人のデータラベラーを雇うことにしました。この時点ですでに自動車メーカーとして常軌を逸しているのですが、さらに前述の2次元から3次元へのシフトと共に、「どうせベクトル空間で経路計画を立てるんだからラベリングも3次元空間でやれば効率がいいよね」と、自前のツールを開発して空間に直接ラベリングを施します。
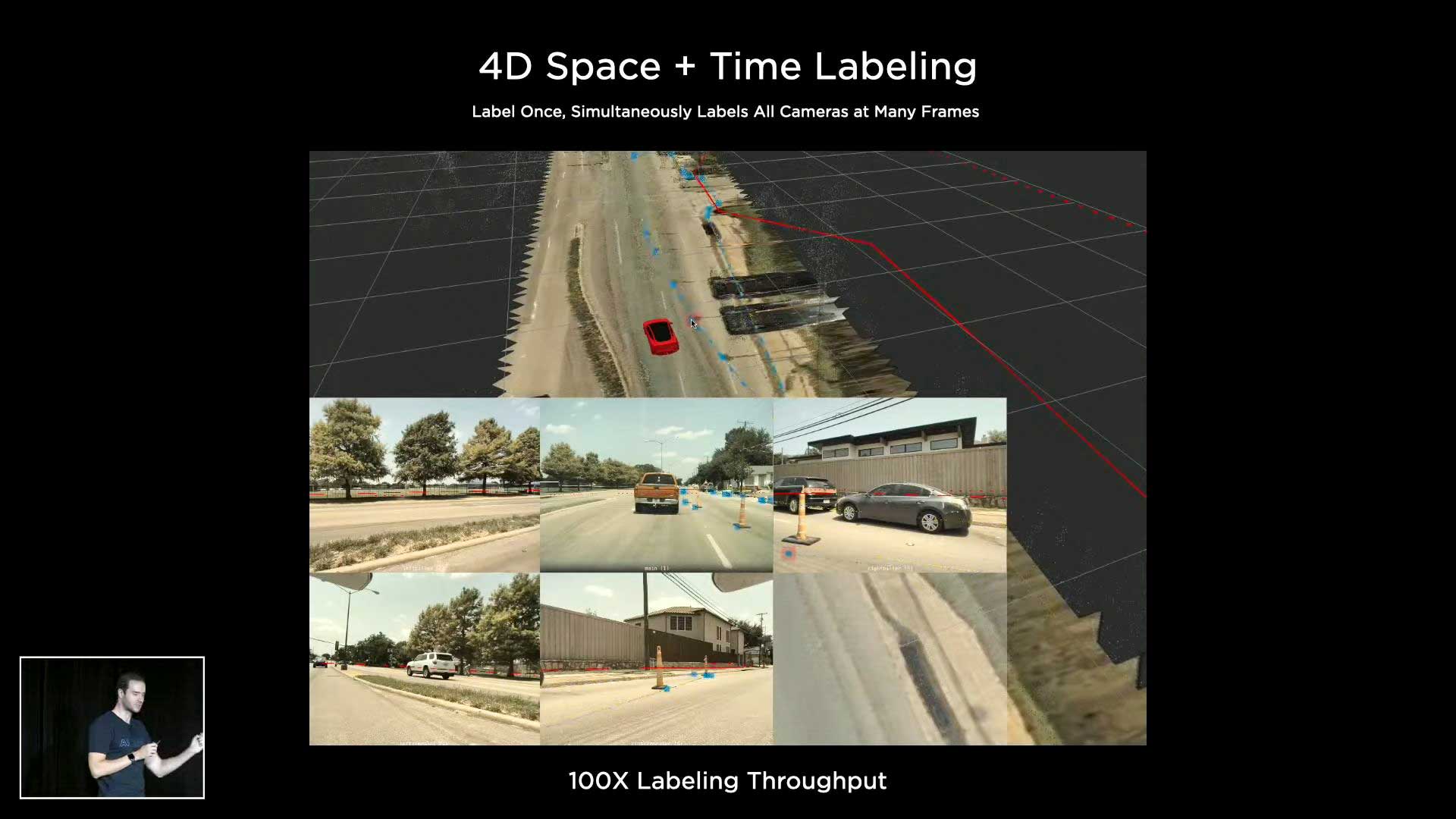
紙芝居のように画像に1枚ずつラベリングするのではなく、3次元空間をラベリングすることで作業速度が100倍に向上。
しかしこれでもまだ作業速度が遅いため、テスラは自動ラベリングも活用するようになります。例えばテスラ密度の高いカリフォルニアなどで1つの交差点に注目して、そこを通過する様々なテスラ車から情報を吸い上げます。それらを重ね合わせて、精密にラベリングを行うことができます。これは高精細マップを作っているのではなく、あくまで素早くラベリングを行うための手法です。


異なる車両、日時、天候などの動画を重ね合わせ、確実なラベリングを実施。
自動ラベリングはデータをリアルタイムで処理しているわけではないため、録画データをゆっくりと時間をかけて解析できます。下図のように歩行者や他車で一時的に奥のオブジェクトが見えなくなっても、少し動画を早送りして、手前の歩行者が通り過ぎた後も奥に人や車がいることを確認して、そこから逆算して「見えないけどそこにいるだろう」と推論およびラベリングをします。これは安全な経路計画をする上でなくてはならない能力です。
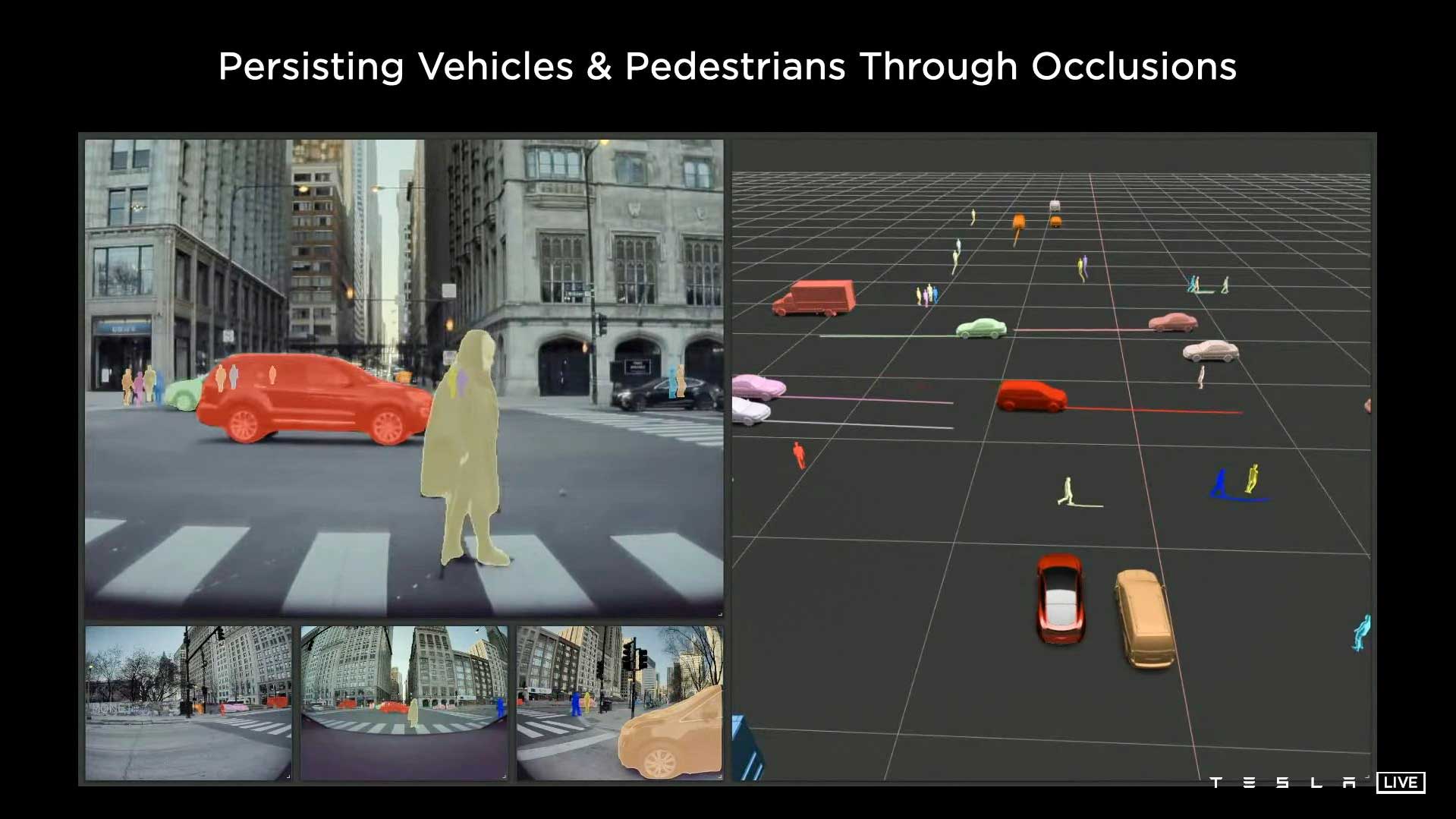
手前の黄色い歩行者や赤いSUV の後ろにいる人まで認識されている様子。
さらに、現実にあまり遭遇しない状況や、従来のラベリング手法が役に立たない状況、そして特定のシチュエーションに対する反応が見たい場合はシミュレーションを使って学習を行います。
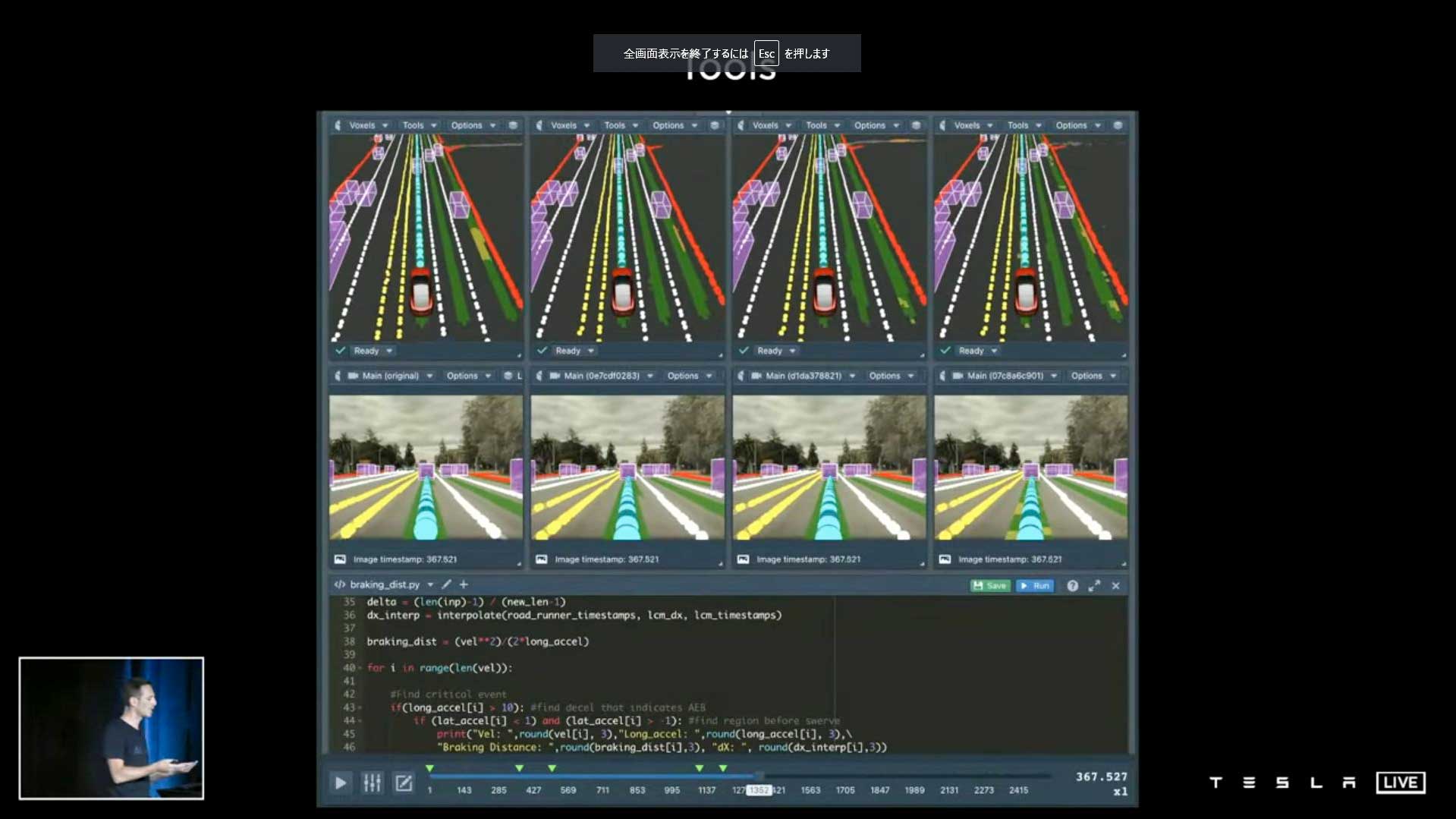
学習が完了したら、出来上がったニューラルネット(NN)を世界中のテスラ車にアップデートとして配信するのですが、下図のような独自開発のデバッグツールを使って、3000台のFSDコンピューターで、週に100万回以上の評価を行って安全に動作することを確認しています。
テスラではラベリングやシミュレーション→ニューラルネットの学習→アップデートの配信→データを収集→ラベリング→学習→配信→データ収集と、自社で高速に回す仕組みを確立しており、凄まじい速度で完全自動運転の実現を目指していますが、ご覧の通り途方もないコンピューターの計算能力を必要とします。そこで考え出されたのがNNの学習に特化したスパコン、DOJOです。
DOJO
ここで登壇するのがテスラのAPハードウェア上級ディレクター、ガネッシュ・ヴェンカタラマナン氏です。彼は前職がAMDの設計工学上級ディレクターで、FSDコンピューターのチップを手掛けたピーター・バノン氏(アップルのA9チップを開発)と共に、世界有数のチップ設計者として知られています。
現在、世界中で使われているNN学習用スパコンはGPU(画像描写用のプロセッサー)をたくさん繋げた構成が主流ですが、GPUは本来NN学習のためのものではないので、NN専用のコンピューターを作ろうというのが開発の背景です。
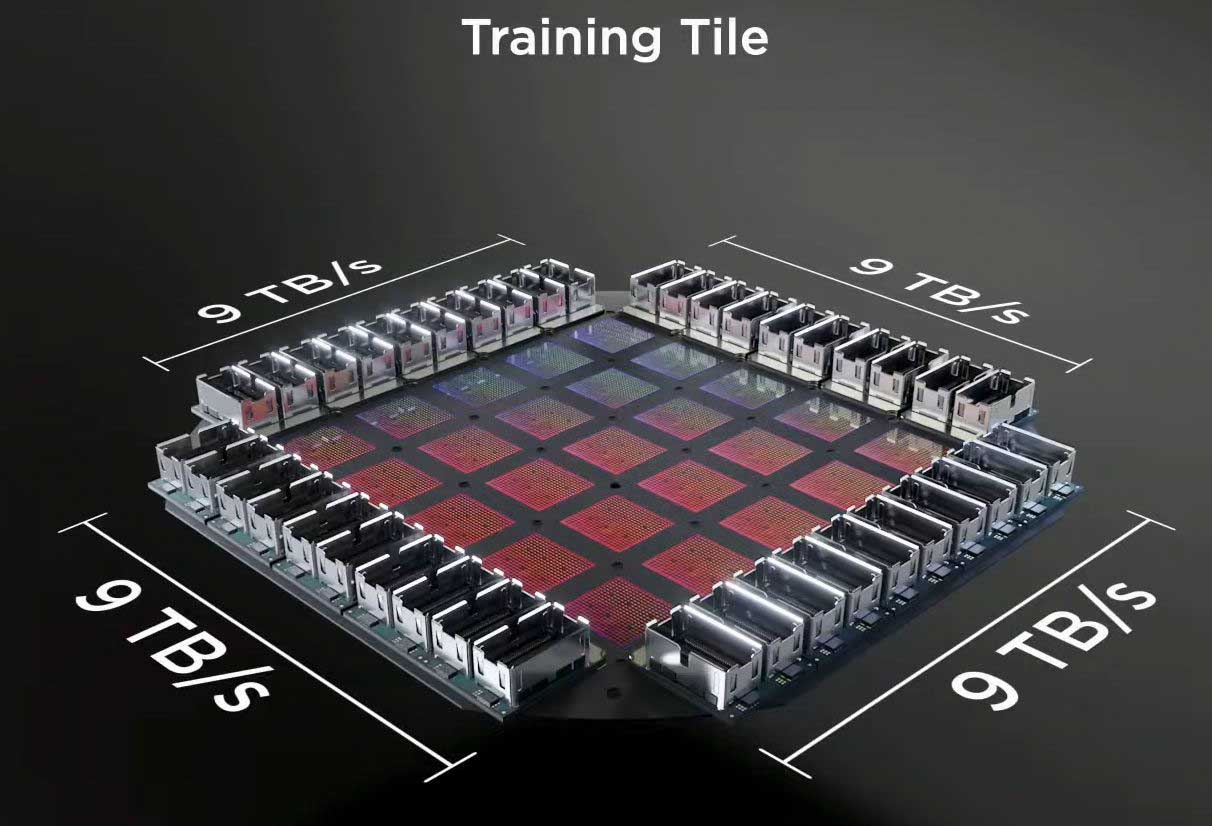
チップの最小構成単位は「トレーニング・ノード」と呼ばれ、できるだけ遅延が少なくなるよう、そしてNNに必要な「行列の掛け算」が素早く行えるよう設計されています。これを354個並べて周囲にインターフェイスをつけることで、「D1チップ」になります。さらにこのチップを25枚並べたものが「トレーニング・タイル」で、1つのキャビネットにタイルが12枚収まります。キャビネットを10台繋げたものが、1秒間に浮動小数点演算が110京回できる、ExaPODです。ExaPODが完成すればNN学習用としては世界最速のコンピューターになり、同コスト比で性能4倍、1ワットあたりの処理能力1.3倍、サイズ5分の1というスペックになります。



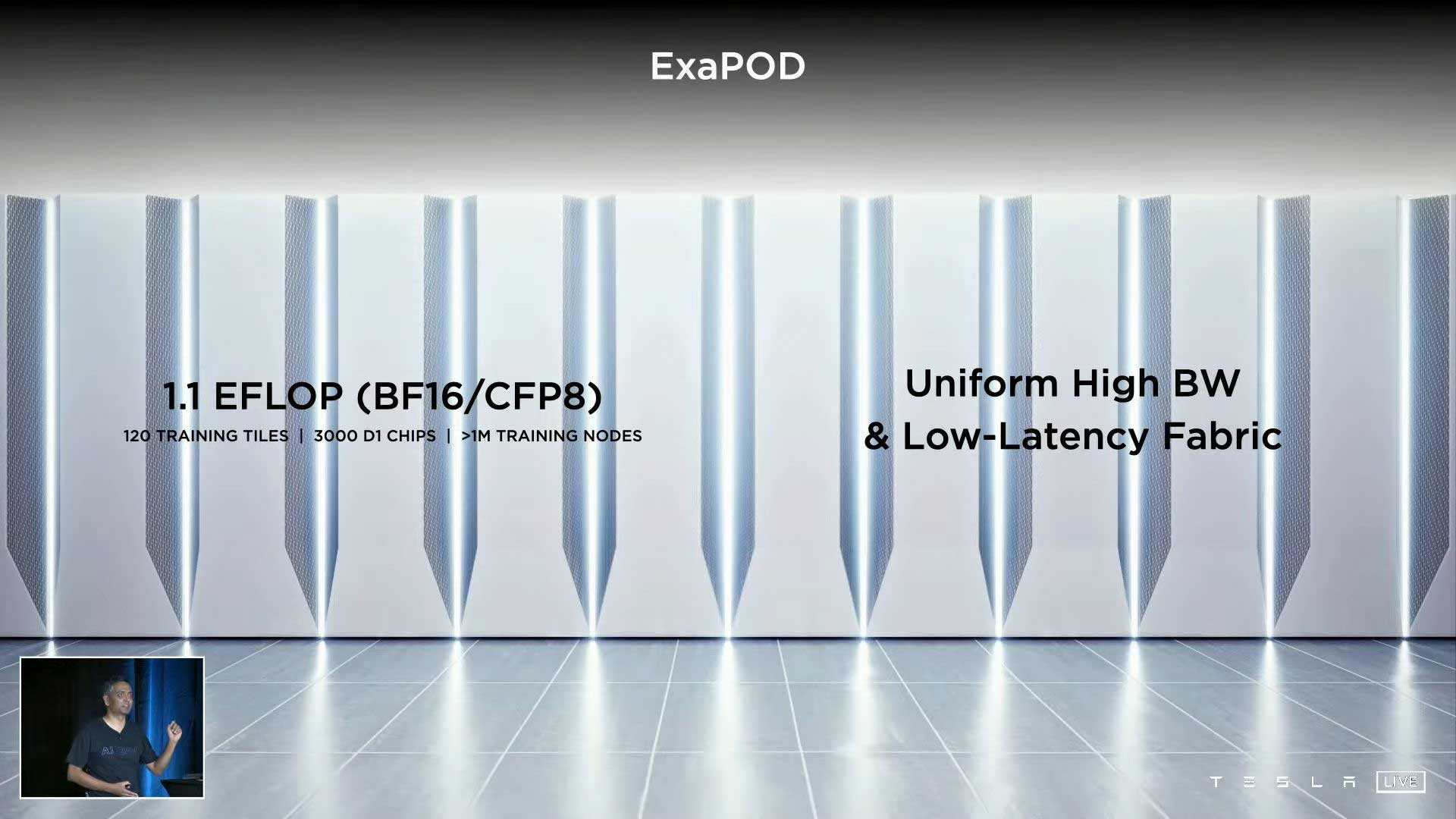
電源の取り回しから排熱まで含め、全てテスラが自社開発しており、恐らく製造は台湾の半導体大手、TSMCと思われます。このアーキテクチャはキャビネットの制約もなく、いくらでも追加することができるので(ソフトウェアがどこまでついていけるか不明ですが)、必要に応じて拡大縮小できるのもメリットです。
スケーラブルな構造のため、その一部をDaaS(Dojo as a Service)として、NNの学習をしたい企業や団体に貸し出すことができます。NNに特化しているため、アマゾンAWSやGoogleクラウドなどの汎用クラウドよりもお得な料金プランを提案できるはずです。加えて、PyTorchが使えるため、自動運転に限らずあらゆるMLに利用可能です。
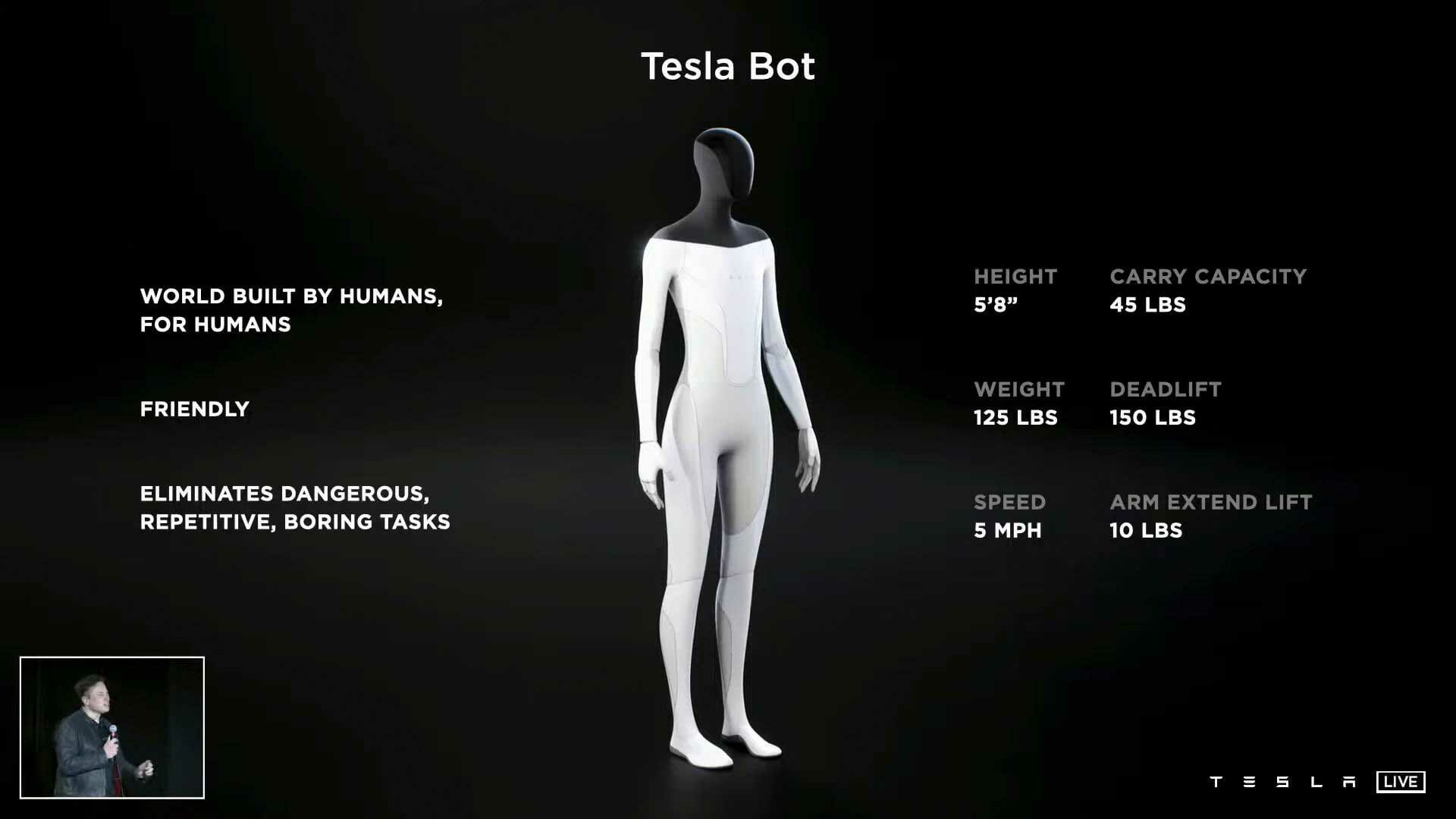
テスラ・ボット『オプティマス』
そこでステージに登場したのがフリーザ様の着ぐるみ……ではなくテスラの汎用人型ロボット、オプティマスです。下図のように胸部にFSDコンピューターが内蔵されており、頭部にはAPのカメラが入っています。
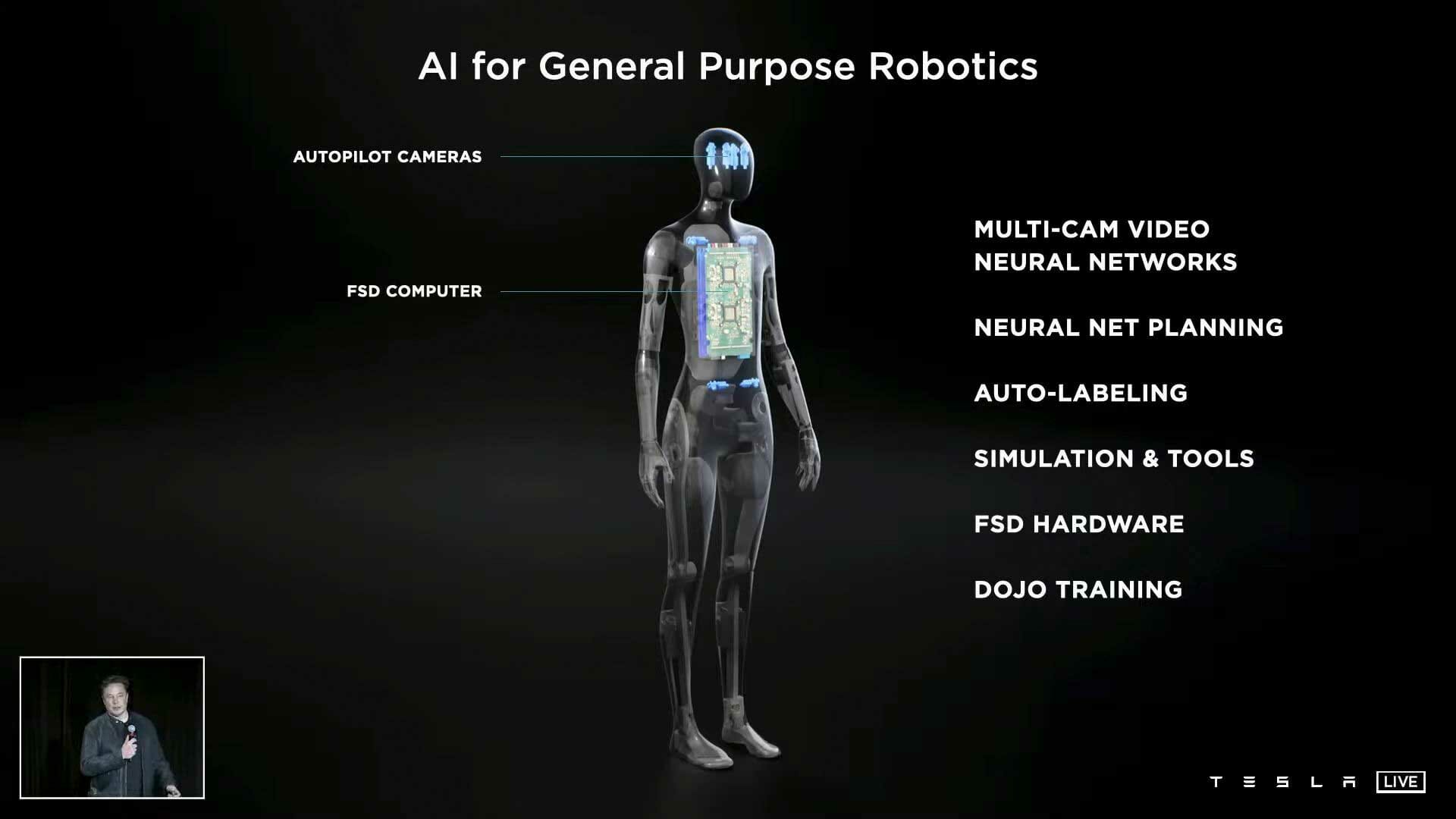
テスラのAPは車というフォームファクターに制限されることなく、様々な形に応用できるようですが、手足を動かしたり、道具を使って作業をするのも同じNN学習ツールを使って行えるようです。現実世界のデータは人にカメラを装着して吸い上げるつもりなのでしょうか(汗)。
オプティマスは「単純で危険な労働からの解放」のために作られたそうですが、私は火星に送り込んで基地建設に従事させる気ではないかと疑っています。いずれにせよ日本でも労働力不足で外国人を大量に受け入れているので、そうした問題の解決につながることを願っています。
※もしもAIが変な自我に目覚めて人間を襲ってくることがあったとしても、オプティマスは最高速度8km/hなので、小走りで逃げれば大丈夫、とイーロン・マスクは言っています(革ジャン着てハーレーに乗ってショットガンを撃ってきたらその限りにあらず)。
まとめ
今回のAI Dayは、投資家へのプレゼンテーションというよりも、新たな人材募集という目的があったように感じます。
APチームが完全自動運転を実現するのに必要な専用のスパコンを作ったり、DOJOが完成しないうちから10倍速い次世代機に着手したり、とにかく猛烈なスピードで開発を進めるテスラ。彼らにとってライバル企業の動向など些細なニュースで、「持続可能なエネルギーへの移行」や「人類を複数の惑星に住まわせる」、「人型ロボットで単純労働をなくす」といった遠大な計画を自らの寿命が尽きるまでにどうすれば達成できるか、という視座で働いているのではないかと感じさせられます。
そのために〇〇Dayを開催して理系の学生たちに夢を与え、優秀な人材を根こそぎ奪っていく。実に合理的な人材募集の方法だと感じました。
(訳・文/池田 篤史)
※当初記事の数値および富嶽との比較に不適切な部分があり、訂正いたしました。(2021/8/25)








コメント
コメント一覧 (5件)
池田さん
AI dayの解説ありがとうございます。
非常にわかりやすく理解出来ました。
やっぱテスラ 恐るべしです。
AI-day、すごかったですよね。
EV Smartブログ様はEVフォーカスのメディアなので取り上げてくださらないかと思いましたが、tesla-bot含めて取り上げてくださりありがとうございます。
記事内にもある通り、今回の発表は技術者採用を目的としており、記者・投資家・アナリスト等大半の人には意味不明に映ったのではないかと思います。
私も技術者の端くれとして完全に理解しているとまではとても言えませんが、テスラがGAFAMのグループから頭一つ抜き出て、次のステージに手をかけつつあることははっきりと分かります。テスラ・スペースXで培われてきた「エンジニアリング・ファースト」の企業姿勢が次の時代を形作りつつあることを思うと、とてもワクワクしますね。
テスラという企業は今は「EV企業」と評されているようですが、2~3年でその評価は大きく覆るものと思います。そのころには日本にも製造拠点が出来るといいのですが。テスラのビジョンに共感し、心躍らせているエンジニアは日本にもたくさんいます。きっと応募者殺到の超人気企業になるでしょう笑
気がついている日本人エンジニアも多いと思いますが、先見の明があれば、とっくにアメリカに渡っているのではないでしょうか。少子高齢化、人口減少、購買力の減衰、おまけにEV後進国ニッポン、ワールドワイド企業のプライオリティーからすれば、日本は眼中にないでしょう。
アメリカではすでに学卒者の就職人気ナンバーワンがSpaceXであることが報道されています。しかし中国や韓国の若者に比べれば、シリコンバレーの日本人はとても少ないようです。
無謀にも見えるE. Musk の「暴走」は野次馬ながら、私は楽しく見つめています。
NOLAさん
ご返信ありがとうございます。
デキるエンジニアはアメリカに行くべき、行けない奴は2流、というご意見でしょうか?耳が痛いです笑
仰る通り日本へ工場を建てる優先度はかなり低いでしょうね。あるとすれば日本側の輸入超過で貿易摩擦が生じるところまでいけば…という感じでしょうか。私もしばらくは注視していますが、激動の予感がします。
この記事を待ってました。日本語でここまで書いてあるものは、たぶんこのサイトだけだと思います。
日本のマスコミ記者には、ロボットではく、この記事あるAIについて、文字にして欲しかったです。